https://colab.research.google.com/drive/1cFEd6TNbo8CWNhbZp0Dydt1c4HYEU6mx?usp=sharing
conda create --name AICUP
conda activate AICUP
pip install -r requirement.txtdata: 將part1以及part2放入data資料夾中data/part1data/part2
對官方給的影片資料進行前處理。
- STEP1: 先將影片按幀數轉為圖片(videoToframe code)
- STEP2: 運用YoloLabel,框出訓練資料中人以及球的位置,產出各物件的位置txt檔,內含各物件的xywh(中心X座標, 中心Y座標, 物件寬, 物件高)。
本專案採用兩種模型權重:1.自己訓練的人球辨識 2.外部姿態辨識權重
-
人球辨識: 採用Ultralytics提供的yolov8m.pt神經網絡架構,並依此架構訓練出自己的模型。 -
姿態辨識: 從WongKinYiu/yolov7下載yolov7-w6-pose.pt。 -
建議將訓練後的權重以及下載好的權重存放至
weights資料夾,Jupyer Notebook 預設會從此資料夾載入權重。
- STEP1: 在
train_yolov8model/dataset.yaml內設定好前處理後的圖片路徑以及相對應的物件位置txt檔。 - STEP2: 在
train_yolov8model/train.ipynb進行訓練。
- 訓練後結果會存放在
train_yolov8model/runs/detect/train內,此目錄底下的的weights會存放best.pt為最終訓練好的權重。 - 而訓練的
confusion matrix則會自動產出於train_yolov8model/runs/detect/train/confusion_matrix.png中。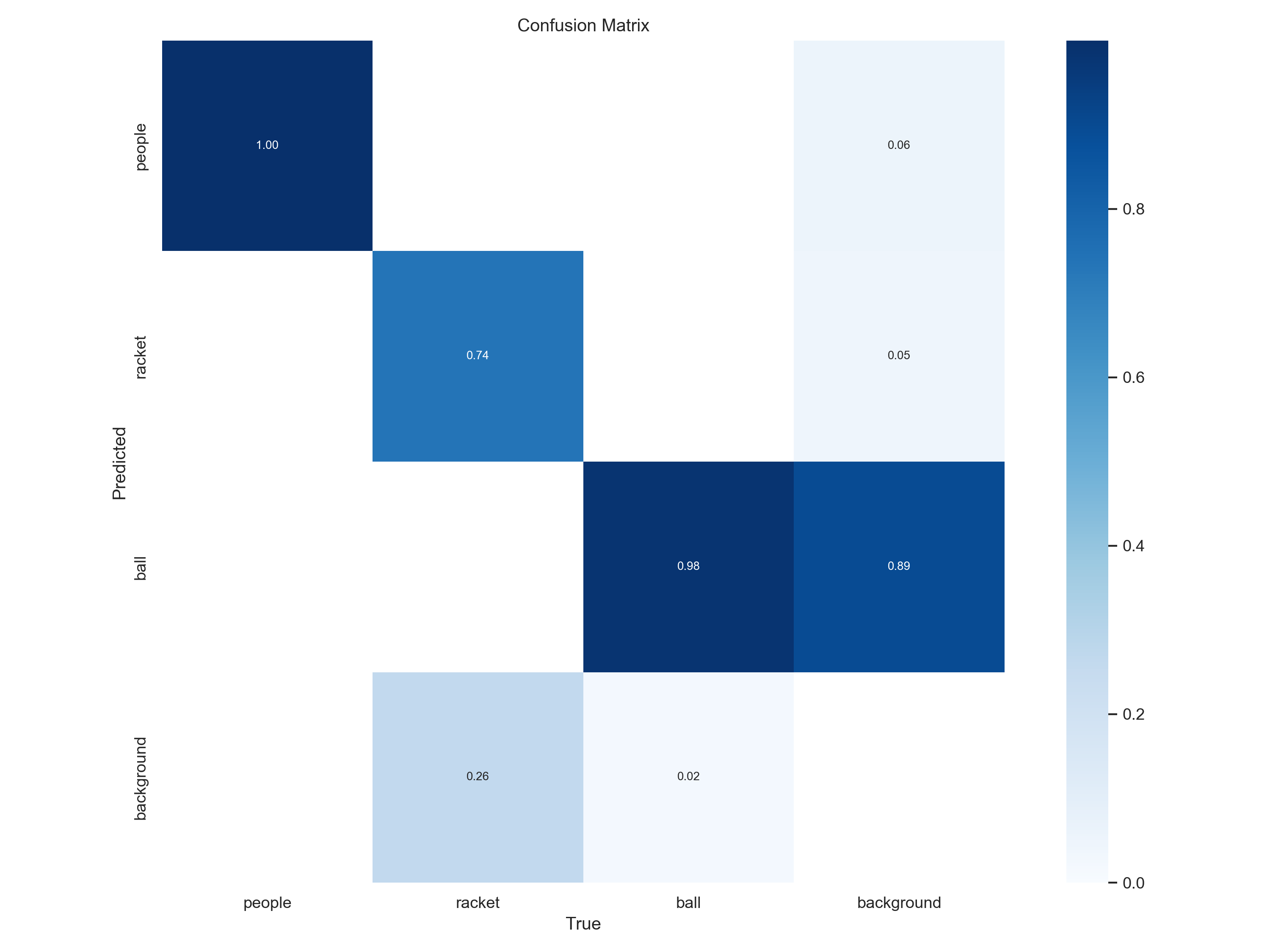

- 以上資料路徑都設定好後,開啟主程式
Final.ipynb直接執行,即可自動產出答案ans.csv檔。 - Answer 寫入格式: 我們會先根據HitFrame判斷後續多個判斷式(如:Hitter, RoundHead,...)結果,並各別以List列出。
HirFrame = [7, 25, 47, 80]
Hitter = [A, B, A, B]
RoundHead = [2, 1, 2, 2]
Backhand = [1, 2, 2, 1]
BallHeight = [2, 2, 1, 2]
#球的位置LandingX,LandingY: 我們直接取用我們偵測到球存入total中的值。
LandingX = int(total[HitFrame[j]][0][0])
LandingY = int(total[HitFrame[j]][0][1])
HitterLocationX = [725, 557, 674, 524]
HitterLocationY = [582, 360, 533, 407]
DefenderLocationX = [520, 517, 680, 553]
DefenderLocationY = [401, 587, 403, 387]
BallType = [1, 3, 6, 6]
Winner = #Hitter[最後一球]的相反球
#最後所有資料以迴圈方式寫入.csv檔中。
writer = csv.writer(csvfile)
for j in range(len(HitFrame)):
writer.writerow([videoname, j+1, HitFrame[j], Hitter[j], RoundHead[j], Backhand[j], BallHeight[j], int(total[HitFrame[j]][0][0]), int(total[HitFrame[j]][0][1]), HitterLocationX[j], HitterLocationY[j], DefenderLocationX[j], DefenderLocationY[j], BallType[j], Winner])
| Model Type | Epoch | Public Score | Private Score | Path |
|---|---|---|---|---|
| yolov8自訓練模型 + yolov7pose | 100 (train best.pt) | 0.0709 | 0.0519 | weights/best.pt |