No. 2160508170
- 霍夫变换直线检测
- 自适应阈值霍夫直线检测
- 基于形态学算法优化的直线检测
-
算法原理
霍夫变换直线检测算法分为以下三个步骤:
-
边缘检测
提取有效边缘线段,过滤无关填充
-
霍夫直线变换
将图像从欧式空间$(x,y)$转换为直线参数空间$(h,\theta)$
-
确定显著点
根据阈值在直线参数空间中筛选有效参数点
-
-
算法实现
实验使用OpenCV库对算法进行了实现
- 边缘检测算子:Canny、Sobel、Laplacian以及USP
- 直线检测:霍夫直线检测、基于采样的霍夫直线检测
-
实验效果
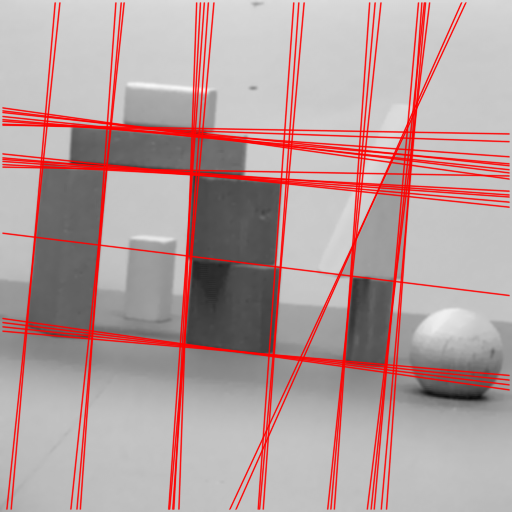
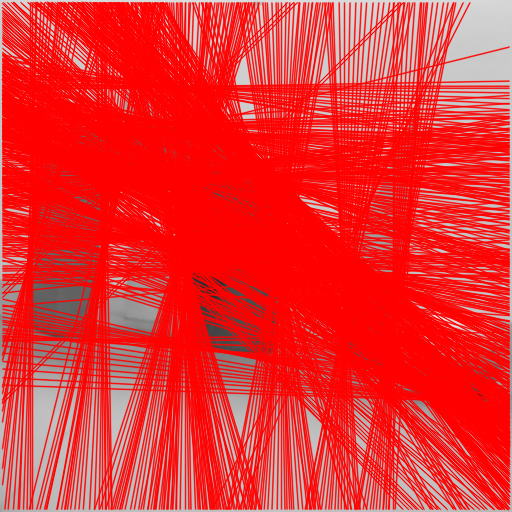
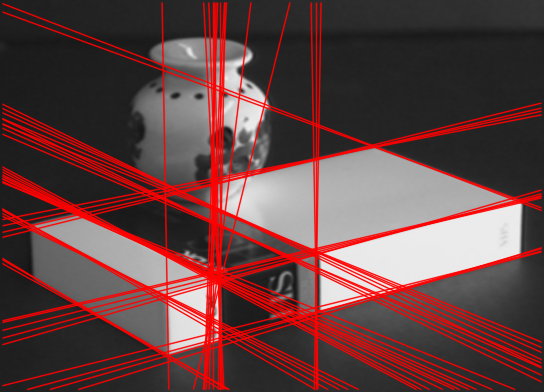
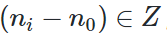
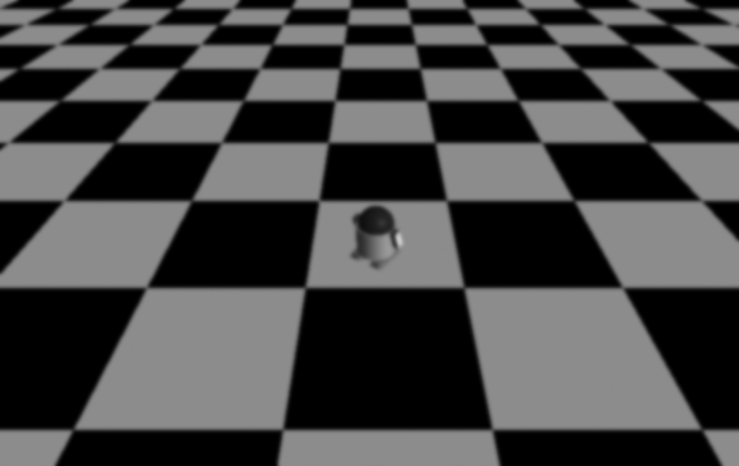
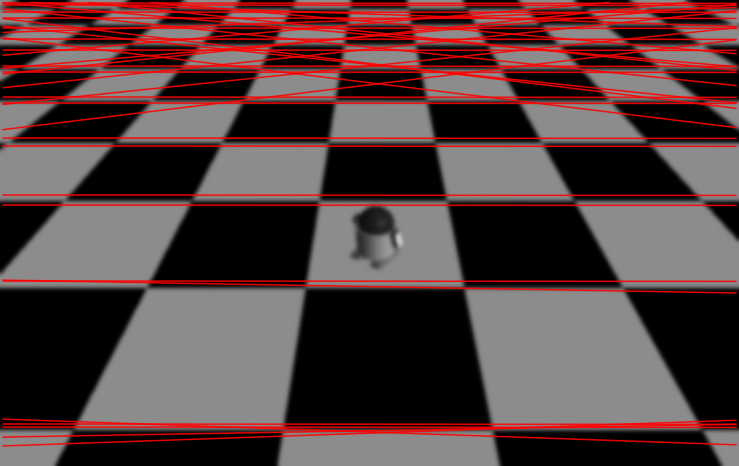
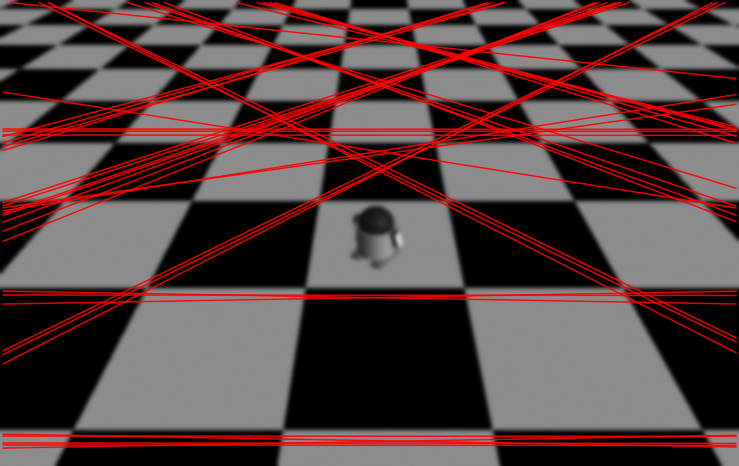
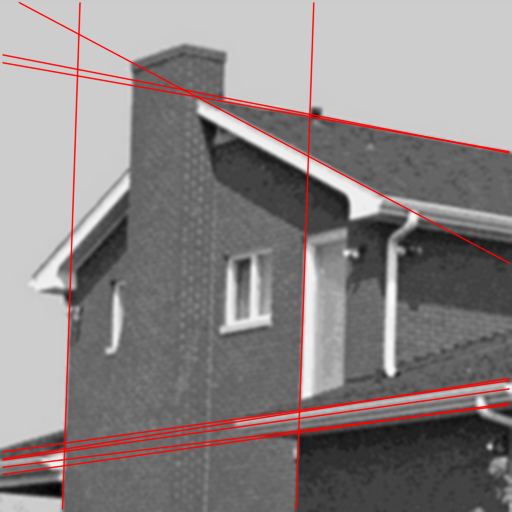
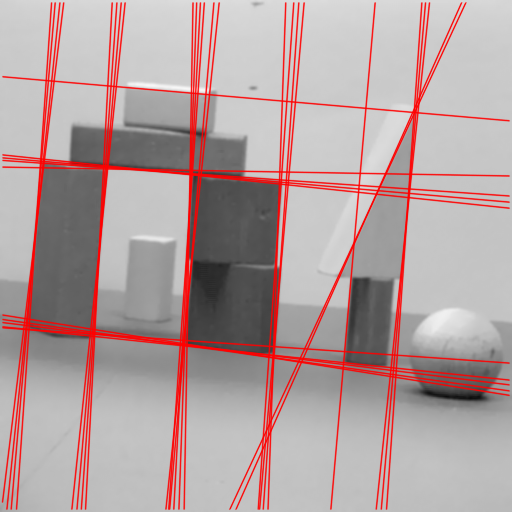
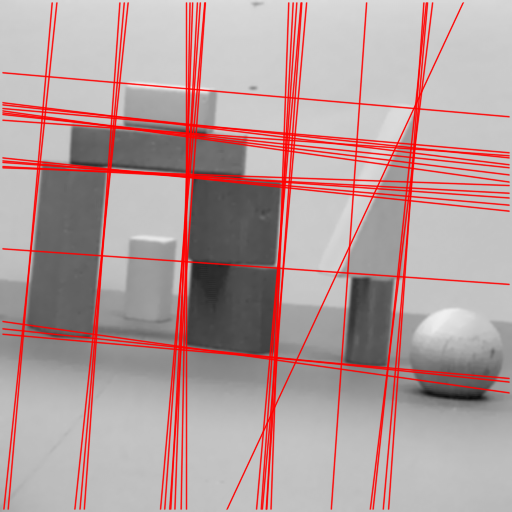
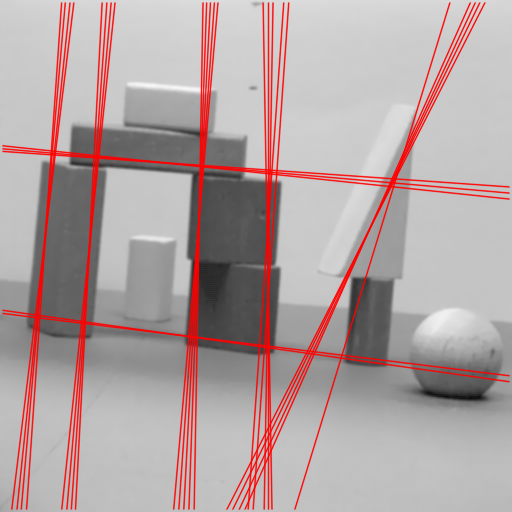
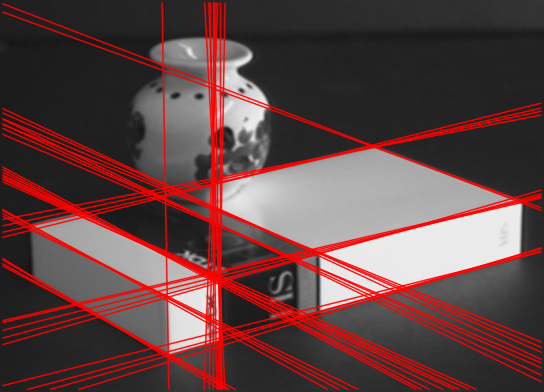
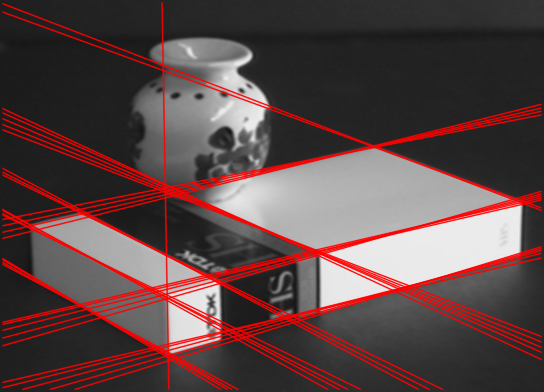
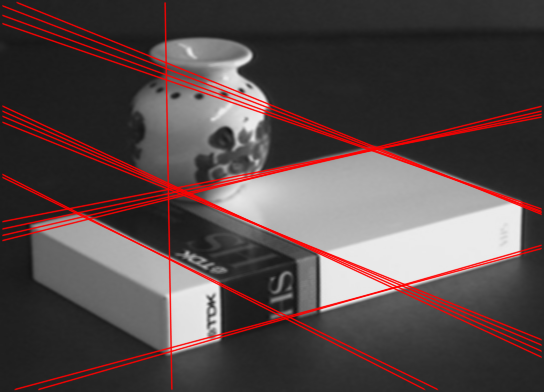
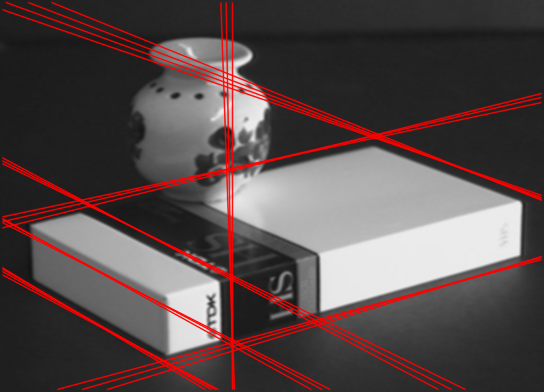
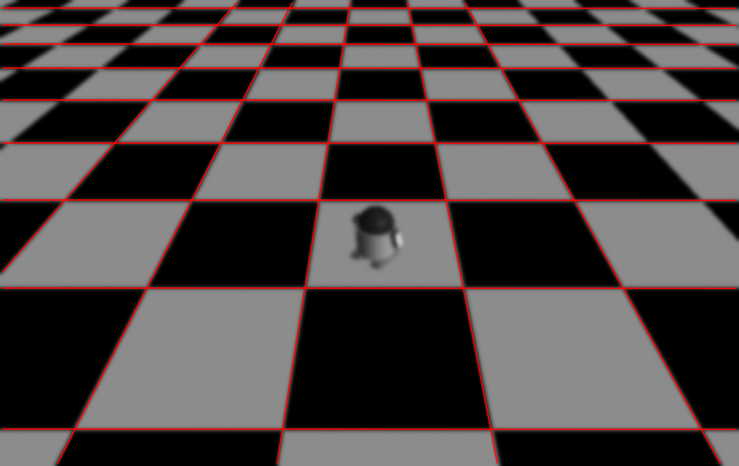
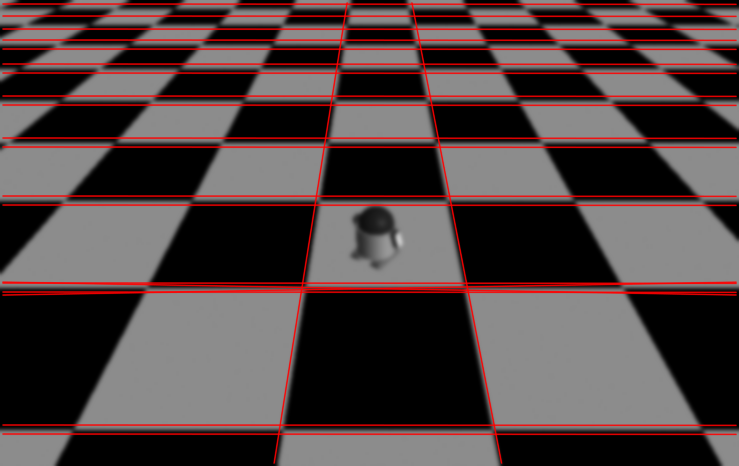
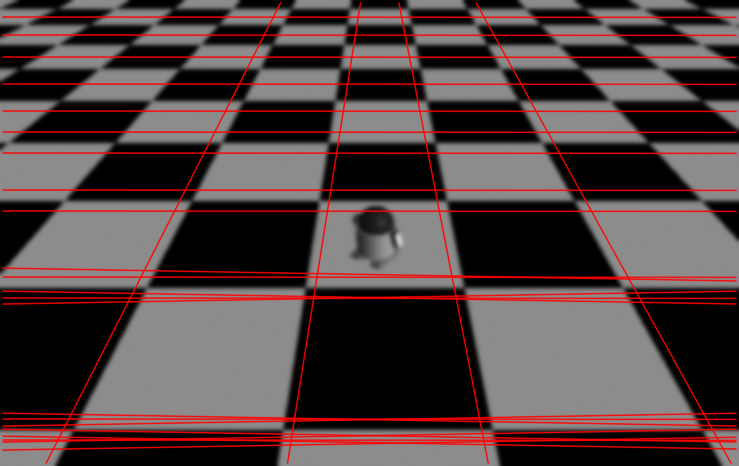
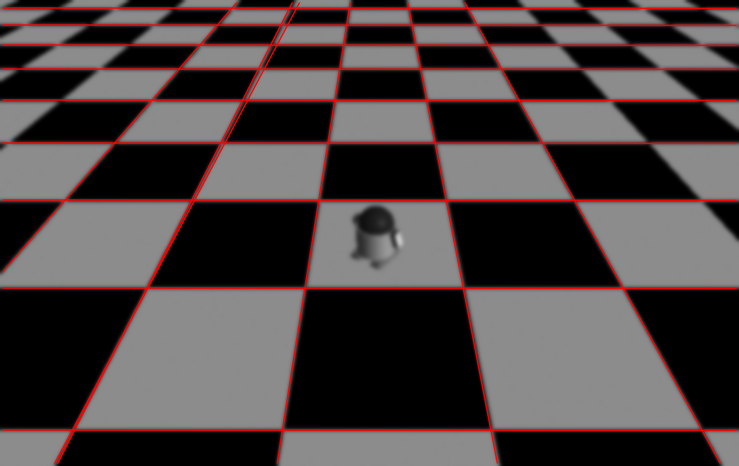
- 使用Canny边缘检测算子直线检测效果
- 实验使用固定阈值,阈值由Canny算子对第一张图片检测结果整定
- 检测到的直线使用红色直线标注
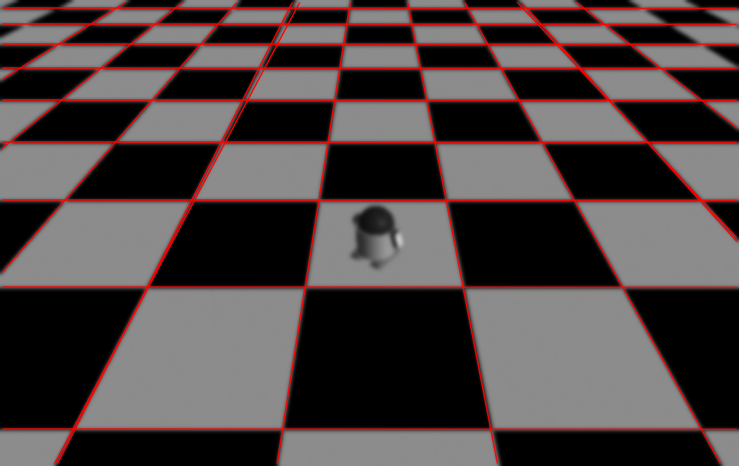
- 可以看出,Hough直线检测的阈值对图片的类型、边缘检测算子类型有着较强的依赖性。使用Canny算子的前两张图检测质量较好,而其他检测结果均出现了阈值过小的问题
- 因此为了提高直线检测算法的适应性,一个很直观的解决方式即为将原方法中静态阈值转换为自适应阈值
原图 | Canny | Sobel | USP | Laplacian
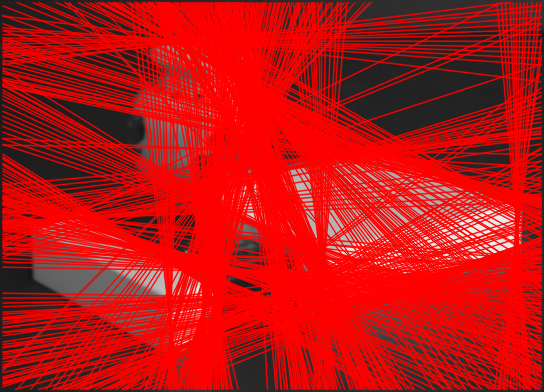

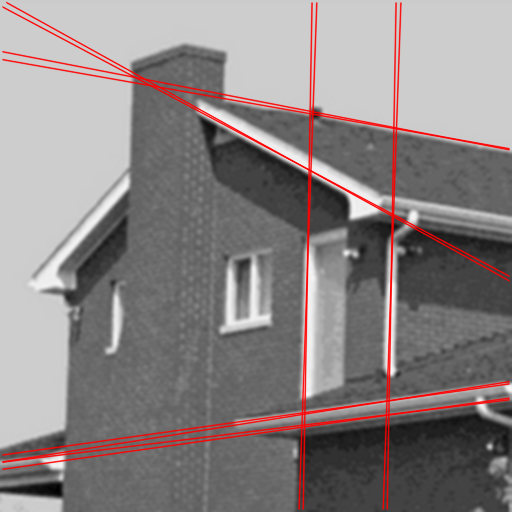
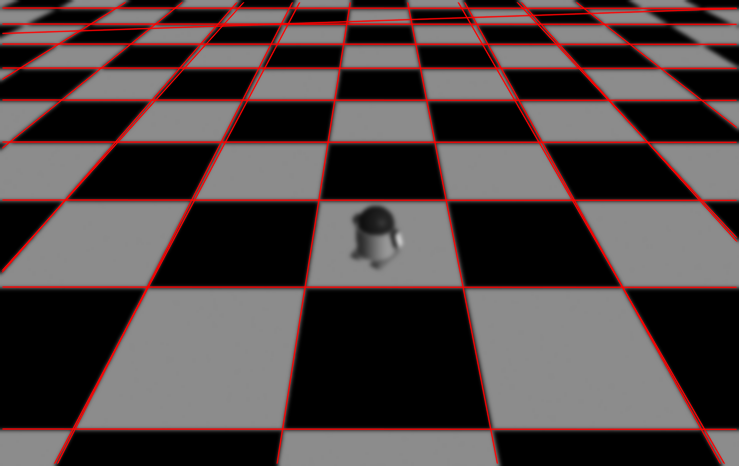
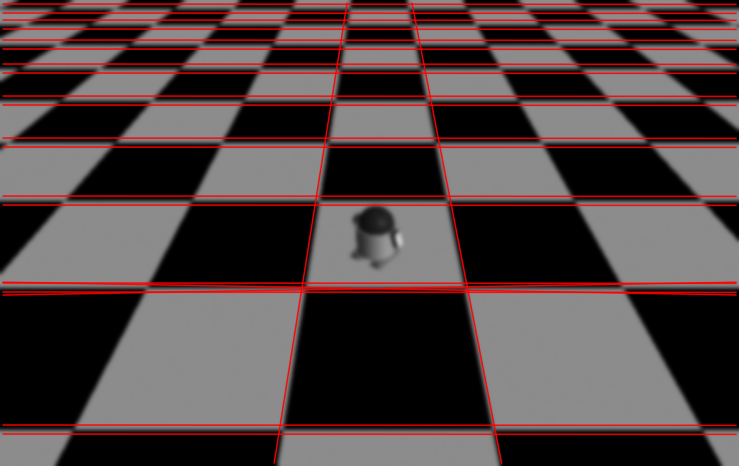
- 使用Canny边缘检测算子直线检测效果














由上一实验我们发现霍夫直线检测中的阈值与图像、检测算子有着较强的相关性,在某些使用场景下我们仅关心检测结果中最显著的部分,因此我们可以设定一个期望直线数量$n_0$,以检测到直线数量$n_i$与期望直线数量之差$e=n_i-n_0$作反馈,动态调整阈值。
-
参数定义
- n0:期望直线数量
- ni:第i次检测计算检测直线数量
- e:误差
- threshold:检测阈值
- α:迭代速率
-
基本迭代公式

-
基本迭代公式在初始阈值与目标阈值偏差较大时会产生较大的超调,降低收敛速度,因此需要对基本迭代公式进行改动

-
在误差较小的情况下上述结果收敛速度较低,考虑到:
必有:

因此最终使用的迭代公式为:

-
实验效果



































-
简介
霍夫变换直线检测直接依赖于边缘检测效果,Canny算子得到的边缘为精细边缘,而Sobel算子、Laplacian算子计算结果确定出的边缘通常为一个渐变区域,这将导致三个问题:
- 对于渐变区域,边缘直线定位不准确,任何处于该区域的直线均为可行解;
- 单一区域直线检测结果大量相似,导致直线检测结果冗余,并且检测结果将集中于部分直线,检测结果较为单一;
- 过于精细的边缘结果将导致霍夫直线检测难以找到显著参数点。
基于以上三个问题,我们有必要对边缘检测结果进行优化,使之更适合直线检测任务。为了克服以上三个问题,我们通过形态学算法将边缘的宽度控制在一个人为给定的宽度,在提高直线检测精确性的同时提高直线检测的检出率。
-
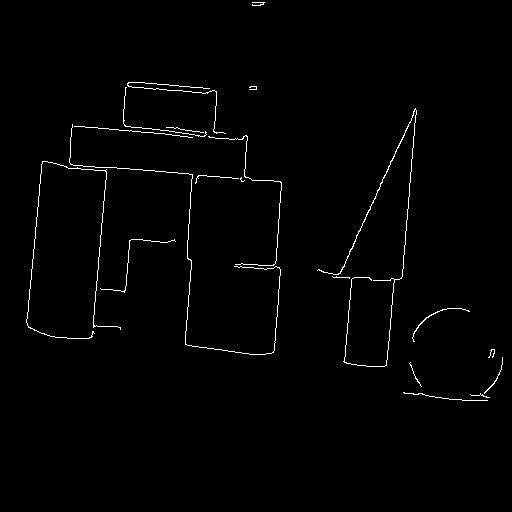
边缘检测
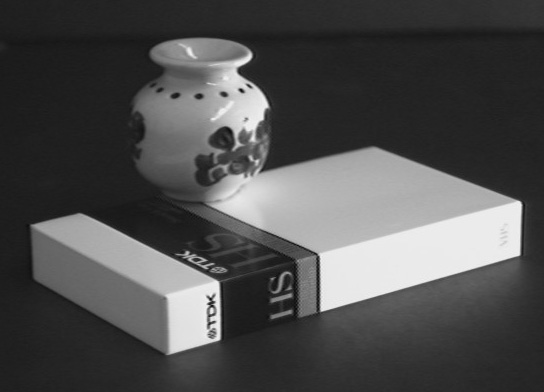
- 在上一实验中我们注意到,使用Canny算子检测到的直线,相比于其他三个检测结果具有更高的精确性,并且重复较少,如图:
原图 | Canny | Sobel | USP | Laplacian
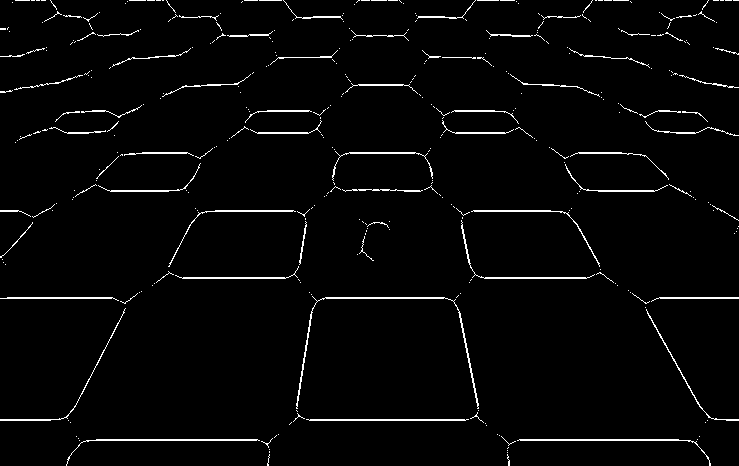
- 相对应的边缘检测结果如下,图像已经通过阈值处理为二值图像
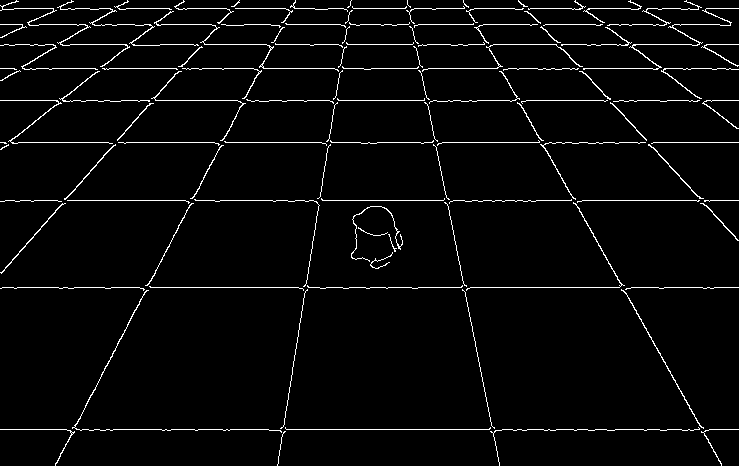

- 观察Canny检测结果与其他三个边缘检测算子检测结果,我们可以发现,其他三个边缘检测算子输出结果均包含有较粗的边缘线段,因此我们需要细化边缘,得到较为精确的边缘
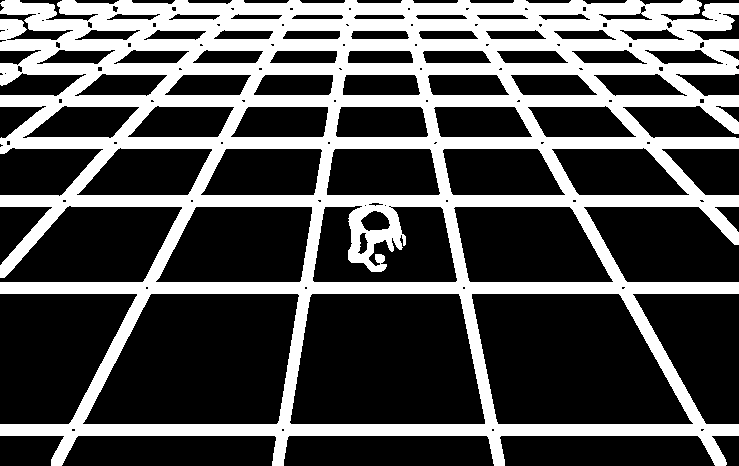
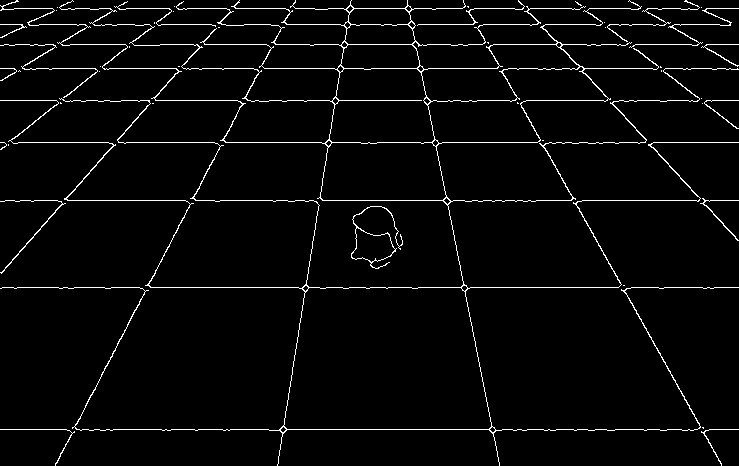
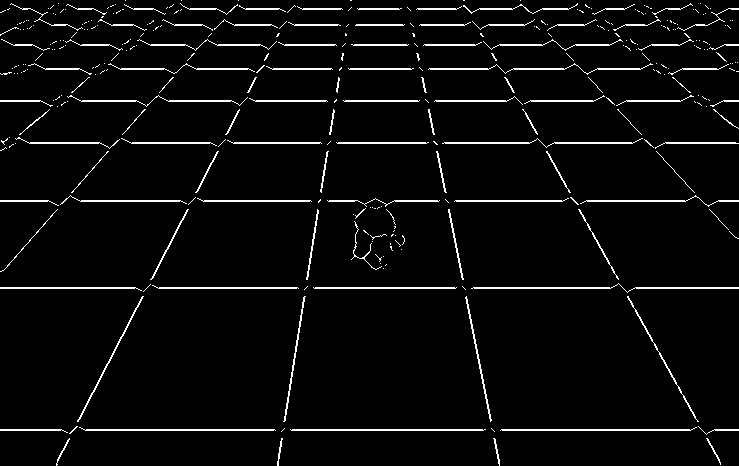
- 我们对边缘检测结果进行骨架提取操作,得到以下结果
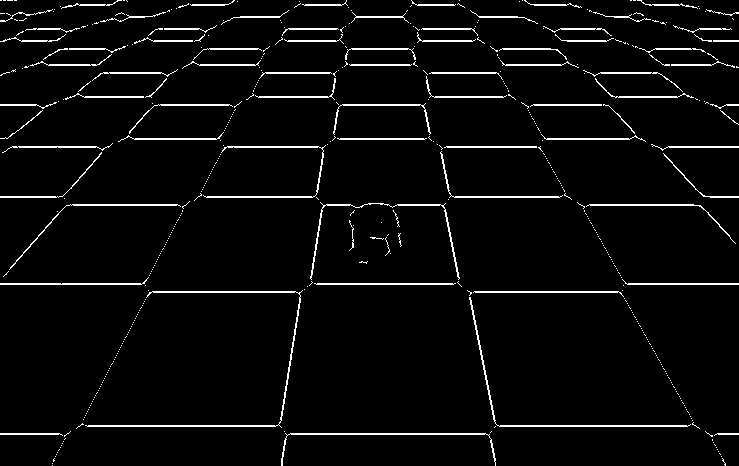
- 细化的边缘会导致直线检测算法难以寻找显著点,因此我们在骨架提取的基础上添加膨胀操作,使得骨架具有一定的宽度,提高直线参数点的显著度
-
实验结果
原图 | Canny | Sobel | USP | Laplacian
















































-
算法及改进算法间纵向对比
- 比较基线:
原图 | Canny | Sobel | USP | Laplacian




- 改进I:自适应阈值检测
- 改进II:自适应阈值+骨架提取
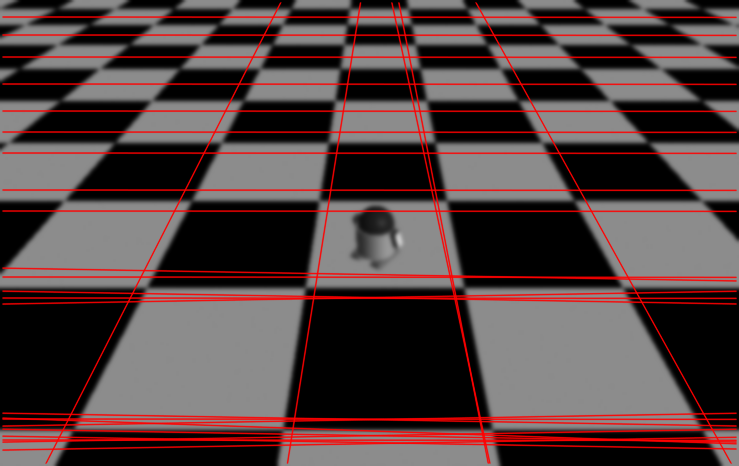
- 改进III:自适应阈值+骨架提取+骨架膨胀
-
不同边缘检测算子间结果比较
-
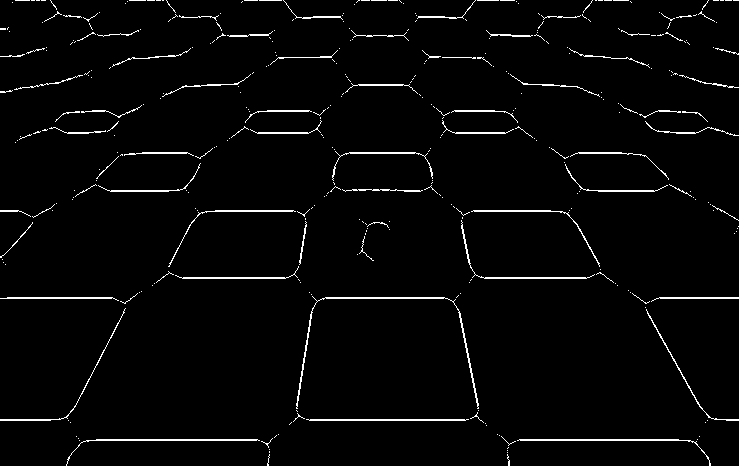
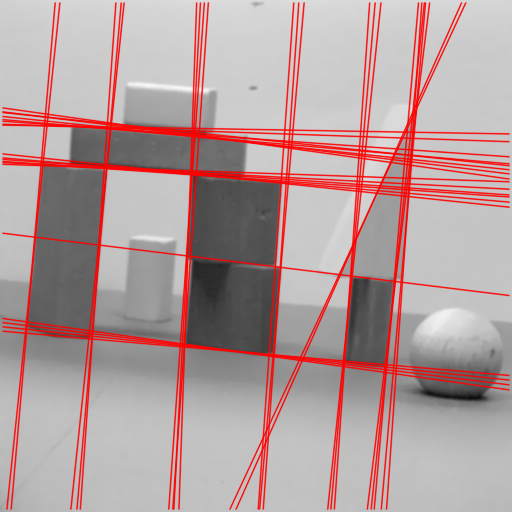
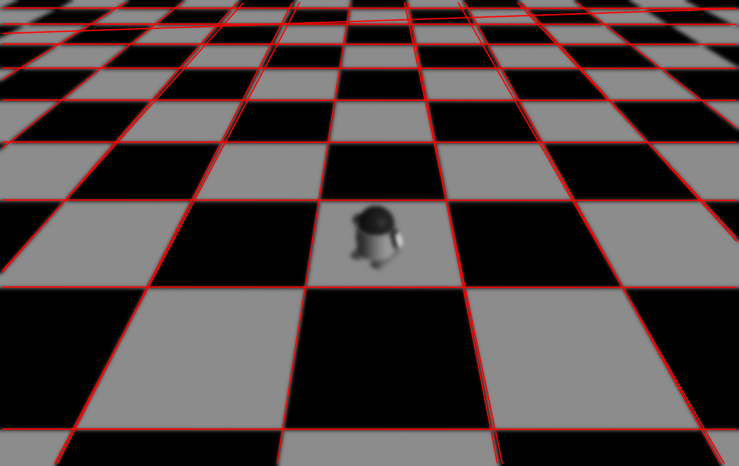
从对方格图的检测结果中可以看出:
- Canny算子、Sobel算子表现较好;
- USP算子由于边缘锐化效果较差,其直线定位角度误差较大;
- Laplacian算子由于其在边缘处会产生偏移的双峰,边缘定位有误差,检测出的直线分布在真正直线的两侧;
原图 | Canny | Sobel | USP | Laplacian
-
从对五角大楼的检测结果中可以看出
- Canny算子对不同尺度细节把握较好,这得益于其双阈值特性
- Sobel算子对细节尺度把握取决于单阈值的选择,阈值越高则对宽边缘敏感度下降,对窄边缘敏感度高
Sobel算子在边缘检测时关注到了五角大楼内部楼间较窄的通道,而忽略了五角大楼外较宽的路。
原图 | Canny Edge | Canny Lines | Sobel Edge | Sobel Lines


-









