Testing Kalman Filter for GPS data
- Guava
lon_lat.dat filewith format:
No | speed[m/s] | latitide | longitude | timestamp [millis]
1 0.43785 17.11855577502637 51.03160054888576 1403701714000
2 0.43785 17.11851547502637 51.03160074888576 1403701714000
3 0.0 17.11855547502637 51.03160054888576 1403711033000
4 0.31275 17.11853729350984 51.03159715421498 1403711034000
.
.
.
Adjust:
Constants.MIN_ACCURACYto value which fits your needs. Smaller the value is -> Kalman filter algorithm has less impact to the final data.
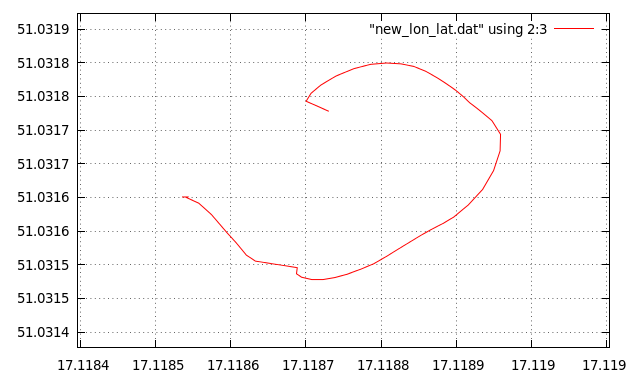
new_lon_lat.datUsage with gnuplot:
Old chart (Some points have been intentionally modified to simulate incorrect data):
plot "lon_lat.dat" using 3:4 w l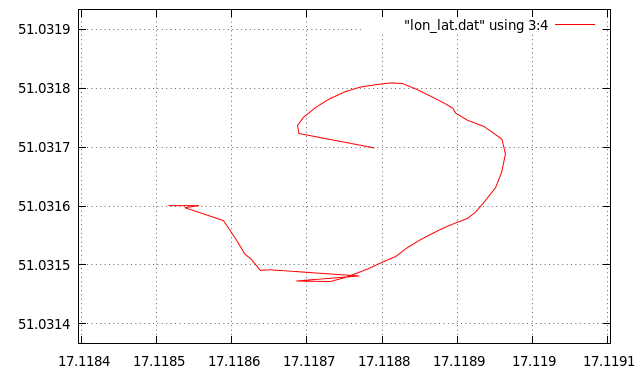
New chart:
plot "new_lon_lat.dat" using 2:3 w l