amr_showcase_navigation.mp4
This repository contains a Gazebo simulation for a differential drive robot, equipped with an IMU, a depth camera and a 2D LiDAR. The primary contriution of this project is to support multiple ROS and Gazebo distros. Currently, the project supports the following versions -
- ROS Noetic + Gazebo Classic 11 (branch ros1)
- ROS2 Humble + Gazebo Classic 11 (branch ros2)
- ROS2 Humble + Gazebo Fortress (branch ros2)
Each of the following sections describes depedencies, build and run instructions for each of the above combinations
In addition to ROS1 Noetic and Gazebo Classic installations, the dependencies can be installed with rosdep
# From the root directory of the workspace. This will install everything mentioned in package.xml
rosdep install --from-paths src --ignore-src -r -ycatkin build --packages-select bcr_botTo launch the robot in Gazebo,
roslaunch bcr_bot gazebo.launchTo view in rviz,
roslaunch bcr_bot rviz.launchThe launch file accepts multiple launch arguments,
roslaunch bcr_bot gazebo.launch
camera_enabled:=True
two_d_lidar_enabled:=True
position_x:=0.0
position_y:=0.0
orientation_yaw:=0.0
world_file:=small_warehouse.worldIn addition to ROS2 Humble and Gazebo Classic installations, we need to manually install gazebo_ros_pkgs (since the same branch supports Classic and Fortress)
sudo apt-get install ros-humble-gazebo-ros-pkgsRemainder of the dependencies can be installed with rosdep
# From the root directory of the workspace. This will install everything mentioned in package.xml
rosdep install --from-paths src --ignore-src -r -ycolcon build --packages-select bcr_botTo launch the robot in Gazebo,
ros2 launch bcr_bot gazebo.launch.pyTo view in rviz,
ros2 launch bcr_bot rviz.launch.pyThe launch file accepts multiple launch arguments,
ros2 launch bcr_bot gazebo.launch.py
camera_enabled:=True
two_d_lidar_enabled:=True
position_x:=0.0
position_y:=0.0
orientation_yaw:=0.0
world_file:=small_warehouse.worldIn addition to ROS2 Humble and Gazebo Fortress installations, we need to manually install interfaces between ROS2 and Gazebo sim as follows,
sudo apt-get install ros-humble-ros-gz-sim ros-humble-ros-gz-bridge ros-humble-ros-gz-interfaces Remainder of the dependencies can be installed with rosdep
# From the root directory of the workspace. This will install everything mentioned in package.xml
rosdep install --from-paths src --ignore-src -r -ycolcon build --packages-select bcr_botTo launch the robot in Gazebo,
ros2 launch bcr_bot gz.launch.pyTo view in rviz,
ros2 launch bcr_bot rviz.launch.pyThe launch file accepts multiple launch arguments,
ros2 launch bcr_bot gz.launch.py
camera_enabled:=True
two_d_lidar_enabled:=True
position_x:=0.0
position_y:=0.0
orientation_yaw:=0.0
world_file:=small_warehouse.world-
Gz Sim (Ignition Gazebo) (small_warehouse World):
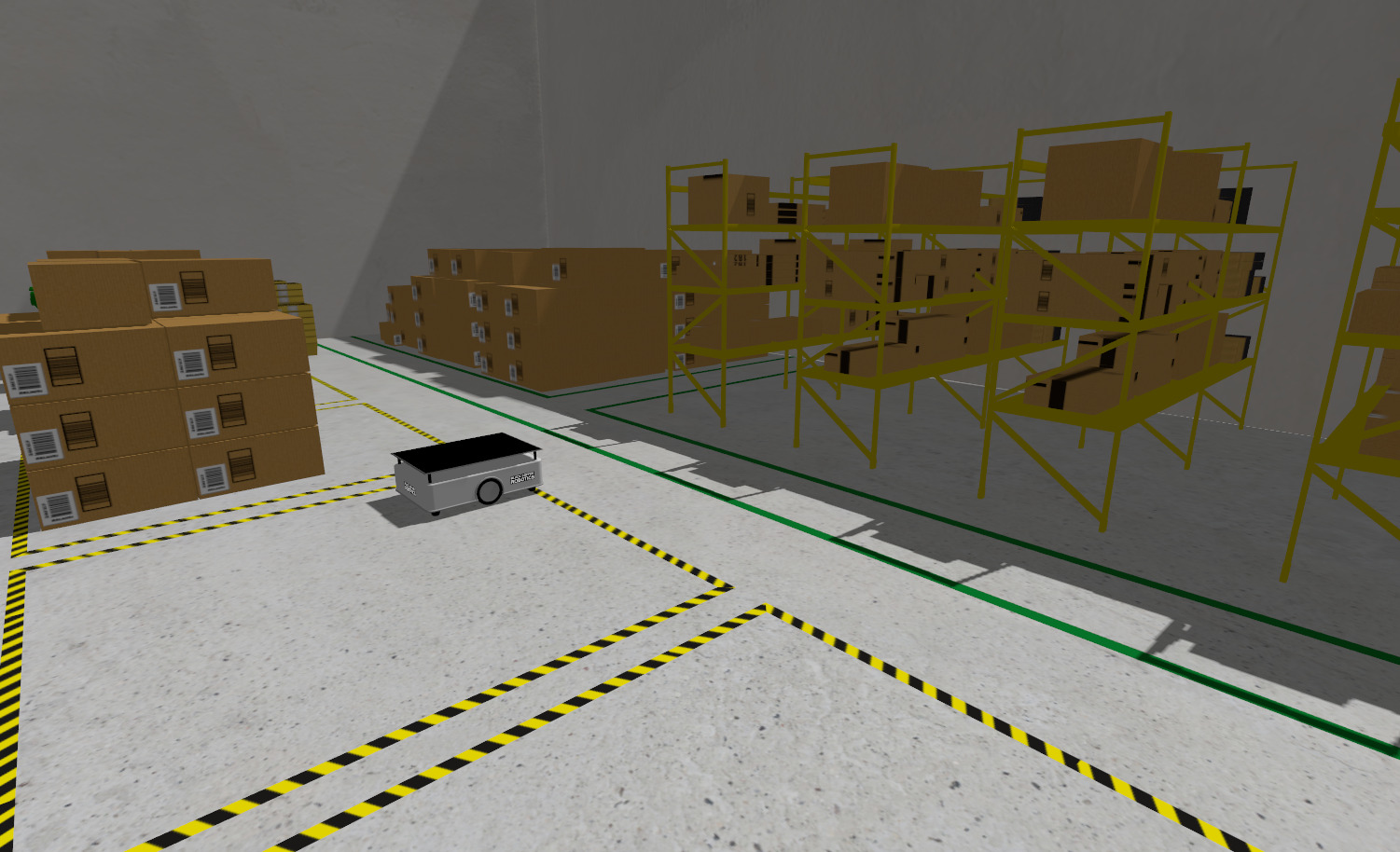
-
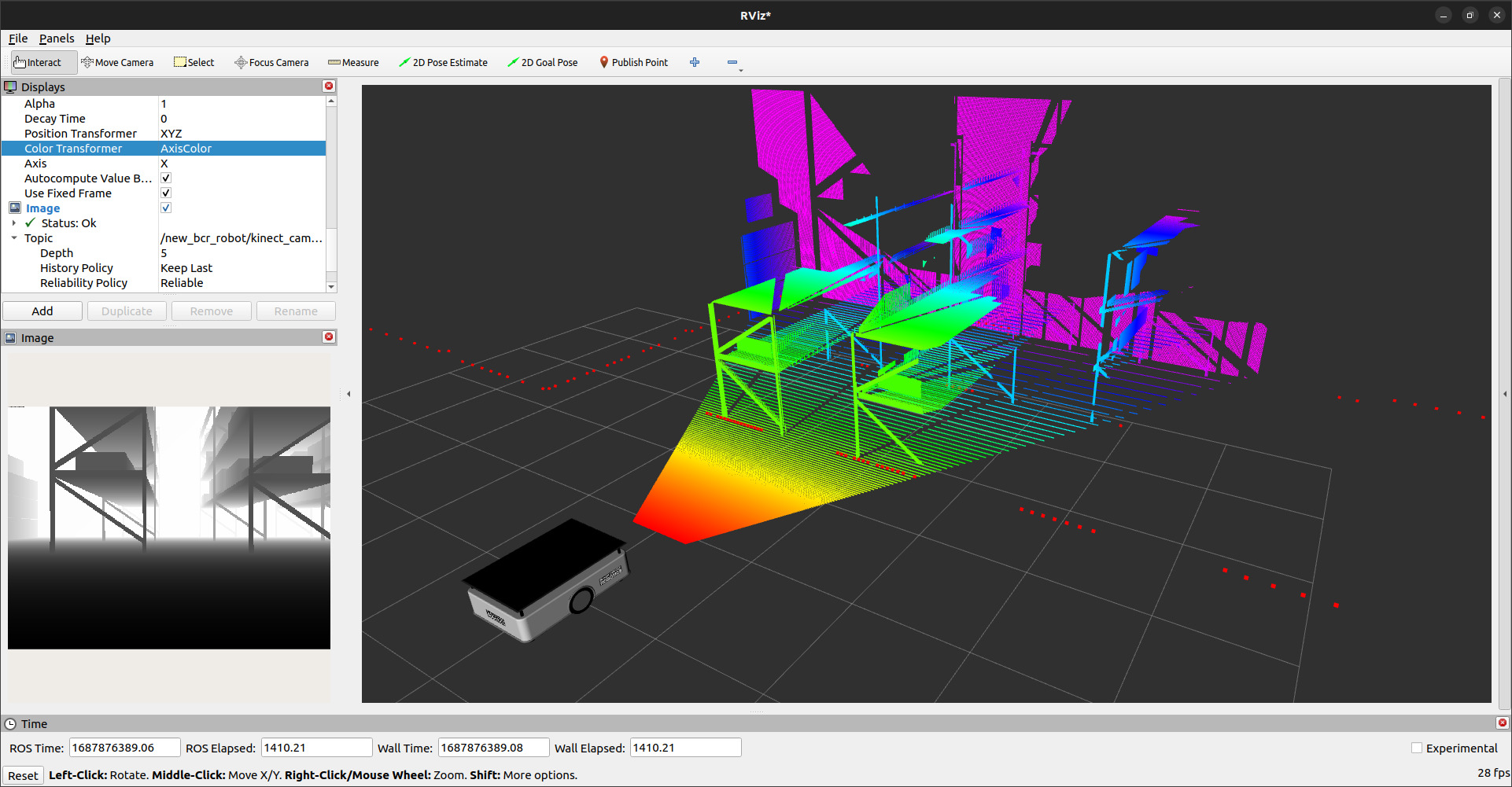
Rviz (Depth camera) (small_warehouse World):