This repo is the official implementation of CVPR2021 paper: "Decoupled Dynamic Filter Networks".
DDF is an alternative of convolution which decouples dynamic filters into spatial and channel filters.
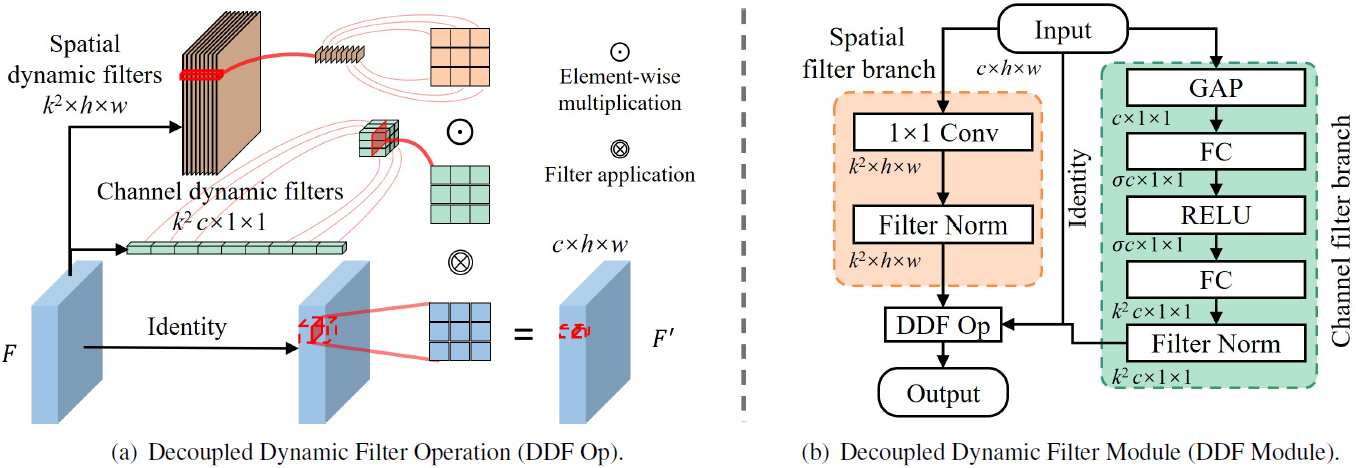
We illustrate the DDF operation and the DDF module. The orange color denotes spatial dynamic filters / branch, and the green color denotes channel dynamic filters / branch. The filter application means applying the convolution operation at a single position. ‘GAP’ means the global average pooling and ‘FC’ denotes the fully connected layer.
Please refer to our project page and paper for more details.
| Model | #Params | Pretrain | Resolution | Top1 Acc | Download |
|---|---|---|---|---|---|
| ddf_mul_resnet50 | 16.8M | ImageNet 1K | 224 | 79.1 | google / baidu |
| ddf_mul_resnet101 | 28.1M | ImageNet 1K | 224 | 80.5 | google / baidu |
| ddf_add_resnet50 | 16.8M | ImageNet 1K | 224 | 78.8 | google / baidu |
| ddf_add_resnet101 | 28.1M | ImageNet 1K | 224 | 79.9 | baidu |
The code for baidu is vub3
Please directly copy the ddf folder to your repo and build the ddf operation. Then, you can easily import the ddf operation, the DDFPack, and the DDFUpPack.
You can design your own module with the ddf operation.
For example, you can get a carafe/involution-like module by fixing all values in the channel filter to 1 for 'mul' combination or 0 for 'add' combination.
channel_filter = torch.ones(filter_size)
output = ddf(input, channel_filter, spatial_filter,
kernel_size, dilation, stride, 'mul')or
channel_filter = torch.zeros(filter_size)
output = ddf(input, channel_filter, spatial_filter,
kernel_size, dilation, stride, 'add')Similarly, you can get a WeightNet-like depthwise filter by fixing all values in the spatial filter to 1 for 'mul' combination or 0 for 'add' combination.
spatial_filter = torch.ones(filter_size)
output = ddf(input, channel_filter, spatial_filter,
kernel_size, dilation, stride, 'mul')or
spatial_filter = torch.zeros(filter_size)
output = ddf(input, channel_filter, spatial_filter,
kernel_size, dilation, stride, 'add')Almost ALL exisitng weight-dynamic depthwise operation (not grid-dynamic like deformable convolution) can be implemented by our ddf operation. Have fun exploring.
- Clone this repo:
git clone https://github.com/theFoxofSky/ddfnet.git
cd ddfnet- Create a conda virtual environment and activate it:
conda create -n ddfnet python=3.7 -y
conda activate ddfnet- Install
CUDA==10.1withcudnn7following the official installation instructions - Install
PyTorch==1.7.1andtorchvision==0.8.2withCUDA==10.1:
conda install pytorch==1.7.1 torchvision==0.8.2 cudatoolkit=10.1 -c pytorch- Install
timm==0.4.5:
pip install timm==0.4.5- Install
Apex:
git clone https://github.com/NVIDIA/apex
cd apex
pip install -v --disable-pip-version-check --no-cache-dir --global-option="--cpp_ext" --global-option="--cuda_ext" ./- Install other requirements:
pip install pyyaml ipdb- Build the ddf operation:
cd ddf
python setup.py install
mv build/lib*/* .- Verify the ddf operation:
cd <path_to_ddfnet>
python grad_check.pyWe use standard ImageNet dataset, you can download it from http://image-net.org/. Please prepare it under the following file structure:
$ tree data
imagenet
├── train
│ ├── class1
│ │ ├── img1.jpeg
│ │ ├── img2.jpeg
│ │ └── ...
│ ├── class2
│ │ ├── img3.jpeg
│ │ └── ...
│ └── ...
└── val
├── class1
│ ├── img4.jpeg
│ ├── img5.jpeg
│ └── ...
├── class2
│ ├── img6.jpeg
│ └── ...
└── ...
To train a model, for example ddf_mul_resnet50, on ImageNet from scratch with 8 RTX 2080Ti, run:
./distributed_train.sh 8 <path_to_imagenet> --model ddf_mul_resnet50 --lr 0.4 \
--warmup-epochs 5 --epochs 120 --sched cosine -b 128 -j 6 --amp --dist-bn reduceTo evaluate a pre-trained model, for example ddf_mul_resnet50, on ImageNet val, run:
python validate.py <path_to_imagenet> --model ddf_mul_resnet50 --checkpoint <path_to_checkpoint>To measure the inference time, run:
python test_time.pyCodebase from pytorch-image-models.
If you find this code useful for your research, please cite our paper.
@inproceedings{zhou_ddf_cvpr_2021,
title = {Decoupled Dynamic Filter Networks},
author = {Zhou, Jingkai and Jampani, Varun and Pi, Zhixiong and Liu, Qiong and Yang, Ming-Hsuan},
booktitle = {IEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR)},
month = jun,
year = {2021}
}