Module for converting raw lidar in kitti to depthmaps in C++/Python.
Surprisingly, I wasn't able to find any decent/simple/readable code online to figure out how to generate registered depthmaps from the kitti pointcloud data. And those that did, gave garbage results (when actually visualized as a pointcloud), or were written with for loops in python which were way too slow for a data pipeline. This codebase handles parallax errors that come from a large transformation between a sparse 3d sensor and an rgb image, and also performs resampling in spherical coordinate space, leading to more accurate results. .
mkdir build;
cd build;
cmake ..;
make
python3 testing.py # Change the path in the file to point to the kitti data
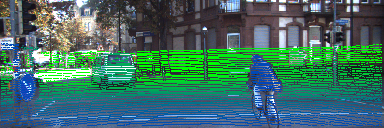
Accounting for parallax distortion etc.

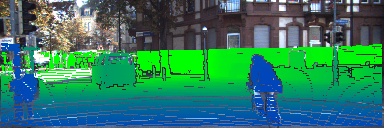
Works well for small images too

Selectively simulate a higher or lower resolution lidar in spherical space

Selectively simulate a higher or lower resolution lidar in spherical space