A*3D dataset is a step forward to make autonomous driving safer for pedestrians and the public in the real world.
- 230K human-labeled 3D object annotations in 39,179 LiDAR point cloud frames and corresponding frontal-facing RGB images.
- Captured at different times (day, night) and weathers (sun, cloud, rain).

- [Sep 27, 2019] We received many requests for download link of A*3D. Still need some time to fix remaining issues like masking out face/license plate, cleaning up the data, finalizing data format, and of course preparing a non-commercial use agreement for signing. It would not take too long (1-2 more weeks), will keep you posted once the data is ready.
- [Sep 23, 2019] A*3D is featured on Import AI, one of the Must-Read AI Newsletters by Open AI’s Jack Clark. See Here.
Click the following .gif for full-version video !
We collect raw sensor data using the A*STAR autonomous vehicle, which is equipped with the following sensors:
- Two PointGrey Chameleon3 USB3 Global shutter color cameras (CM3-U3-31S4C-CS) with 55Hz frame rate, 2048 × 1536 resolution.
- A Velodyne HDL-64ES3 3D-LiDAR with 10Hz spinrate, 64 laser beams.
The following depicts the Sensor setup for A*3D data collection vehicle platform.

-
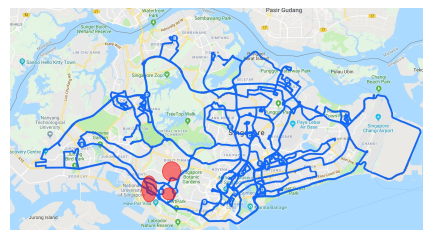
The data collection covers the entire Singapore including highways, neighborhood roads, tunnels, urban, suburban, industrial, HDB car parks, coastline, etc.
-
NuScenes only covers a small portion of Singapore roads (highlighted in red).

- 17% frames with high object-density.
- The number of annotations per frame for A*3D dataset are much higher than KITTI dataset.
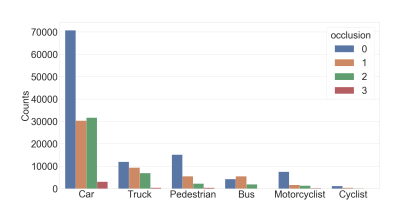
- The A*3D dataset comprises 7 annotated classes corresponding to the most common objects in road scenes.

-
25% frames with heavy occlusion.
- About half of the vehicles are partially or highly occluded.
- Average number of points inside the bounding box of each class and the Log number of points within bounding box.
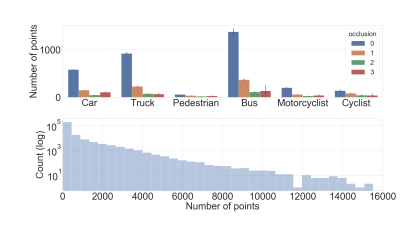
-
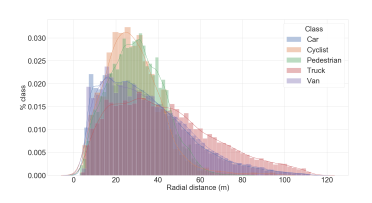
Radial distance.
-
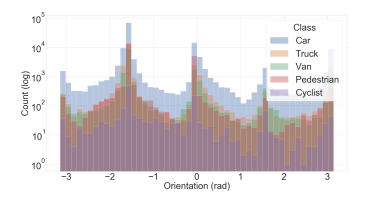
Distribution of object orientation.
-
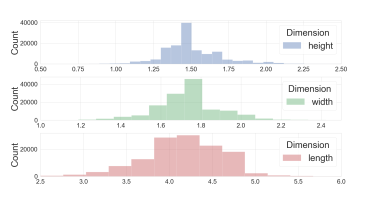
Box dimensions.





-
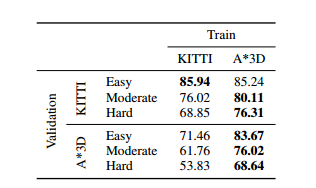
Object-density: Cross-dataset Evaluation
- A pre-trained model of PointRCNN on KITTI suffers almost a 15% drop in mAP on A*3D validation set.
- When trained on our high-density subset, PointRCNN achieves much better performance on the KITTI validation set, especially on Moderate and Hard with almost 10% improvements.
-
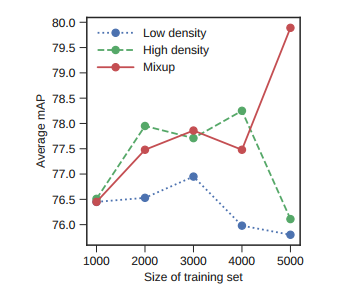
High object-density vs. Low object-density
- When increasing the training data, the performance improvements are marginal.
- The best result comes from mixing high and low density samples.
-
Day-time vs. Night-time
- We are the first to provide a systematic study on the effects of night-time on 3D object detection systems with F-PointNet and AVOD methods.
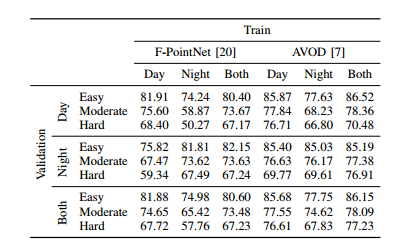
- We are the first to provide a systematic study on the effects of night-time on 3D object detection systems with F-PointNet and AVOD methods.



Please email Jie Lin (lin-j@i2r.a-star.edu.sg) for the download link to the dataset.
-Note: this dataset is for non-commercial research purposes only. A Non-Commercial Use Agreement needs to be signed.
-Note: Please include keyword "A*3D" in the title of the email, just in case we overlook it.
If using our data in your research work, please cite the following paper:
@article{astar-3d,
author = {Quang-Hieu Pham, Pierre Sevestre, Ramanpreet Singh Pahwa, Huijing Zhan, Chun Ho Pang, Yuda Chen, Armin Mustafa, Vijay Chandrasekhar, Jie Lin},
title = {A*3D Dataset: Towards Autonomous Driving in Challenging Environments},
year = {2019},
eprint = {1909.07541}
}