A Python framework that facilitates running dynamic simulations in PSS/E. Developed in order to study the effects of vehicle-to-grid on the overall stability of the power system.
We have used this framework to produce the results for the paper "Improving power grid transient stability by plug-in electric vehicles" published in the New Journal of Physics. Some of the findings from this paper were also covered by Phys.org a popular science and technology web-magazine that did a short story on our work. Currently our focus is on developing even better control strategies for the power grid of the future.
You must have PSS/E installed and added to the system path. You can download a free copy from the Siemens website. The framework was developed on top of PSS/E version 33, I am not sure how it will behave with other versions. The PSS/E installations comes with a Python 2.7 installer and is automatically configured during installation. I had a lot of problems when there were more then one Python versions installed on Windows. Therefore, I strongly suggest that you delete any other version of Python you might have and software like Anaconda, Canopy, Wing IDE and IPython.
Create a new file e.g. "my_dynamic_simulation.py" and use the builder syntax to build a Dynamic Simulation object with the desired properties. For example to simulate a bus fault at bus 5 that starts at 1 seconds, lasts for 0.1 seconds on case39 (New England) and monitor the generator speeds and all bus voltages you would write
import psspy_import
import disturbances
import channel_utils
import dynamic_simulation
builder = dynamic_simulation.DynamicSimulationBuilder()
#set the power system source files
builder.withRawFile("normal_case39.raw").withDyrFile("normal_case39.dyr")
#set the disturbance
builder.withDisturbance(disturbances.BusFault(1,.1,5))
#set generator speed and bus voltage as channels in PSS/E
builder.withChannel(channel_utils.CHANNELS.SPEED).withChannel(channel_utils.CHANNELS.V)
#plot the results in PSS/E
builder.withPlot()
#finally build and run the simulation
builder.build().runSimulation()You can reuse most of the code from the previous example to see how the system behaves when vehicle-to-grid is implemented. Lets create a new file "stability_comparison.py" and see how the system reacts to a branch trip between buses 5 and 6 that starts at 2 seconds and lasts for half a second.
import psspy_import
import disturbances
import channel_utils
import dynamic_simulation
import control
builder = dynamic_simulation.DynamicSimulationBuilder().\
withRawFile("normal_case39.raw").withDyrFile("normal_case39.dyr").\
withDisturbance(disturbances.BranchTrip(2,.5,5,6,'1 ')).withPlot()
#run a standard simulation without vehicle-to-grid
builder.build().runSimulation()
#build and run a simulation with vehicle-to-grid where the vehicles output power is governed by the SimpleLocalControl strategy
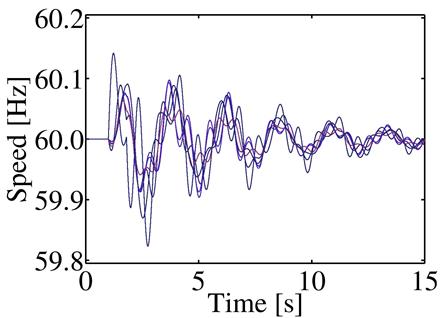
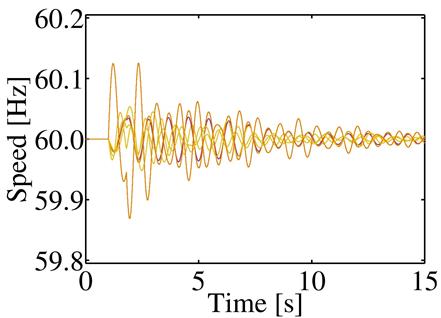
builder.withControl(control.SimpleLocalControl(5)).build().runSimulation()The framework comes with a utility that uses binary search to find the t_ccl. All you need to do is define the type of disturbance and control and invoke the determineT_ccl function like so
import psspy_import
import disturbances
import dynamic_simulation
import t_ccl
simulation = dynamic_simulation.DynamicSimulationBuilder().\
withRawFile("normal_case39.raw").withDyrFile("normal_case39.dyr").\
withDisturbance(disturbances.BusFault(1,.5,5)).build()
result = t_ccl.determineT_ccl(simulation)Since you will usually want to calculate t_ccl for many different disturbances and different types of control we developed a utility that calculates t_ccl in parallel for a list of dynamic_simulations. For example you can find t_ccl for all bus faults and a range of control coefficients using the following code
import psspy_import
import disturbances
import dynamic_simulation
import t_ccl_par
import control
#define control objects
control_coefficients = [0.1*x for x in range(0,30)]
control_objects = [control.SimpleLocalControl(each) for each in control_coefficients]
#make the initial builder
builder = dynamic_simulation.DynamicSimulationBuilder().withRawFile("normal_case39.raw").withDyrFile("normal_case39.dyr")
#create a list of builders with bus faults at each bus
builders = t_ccl_par.getAllBusFaultsBuilders(builder)
#for each bus fault create a list of builders that have different control objects
all_builders = t_ccl_par.getAllBuildersWithControl(builders,control_objects)
#finally calculate the t_ccl for all these different scenarios concurrently
t_ccl_par.calculatetccl(all_builders,1,"results_t_ccl.txt")
#the results will be written to the file "results_t_ccl.txt"Some nice plots that I've done with this framework. Just a reminder about the export_to_matlab option which enables you to use Matlab's rich plotting functionality