ASTool (fork of ESTool)
Code to reproduce “Reinforcement Learning for Improving Agent Design” (designrl.github.io and arxiv.org/abs/1810.03779). Uses OpenAI Gym version 9.3, rather than most recent version.
To run pre-trained models:
python model.py ENVNAME zoo/ENVNAME.json
Where ENVNAME is one of:
augment_ant
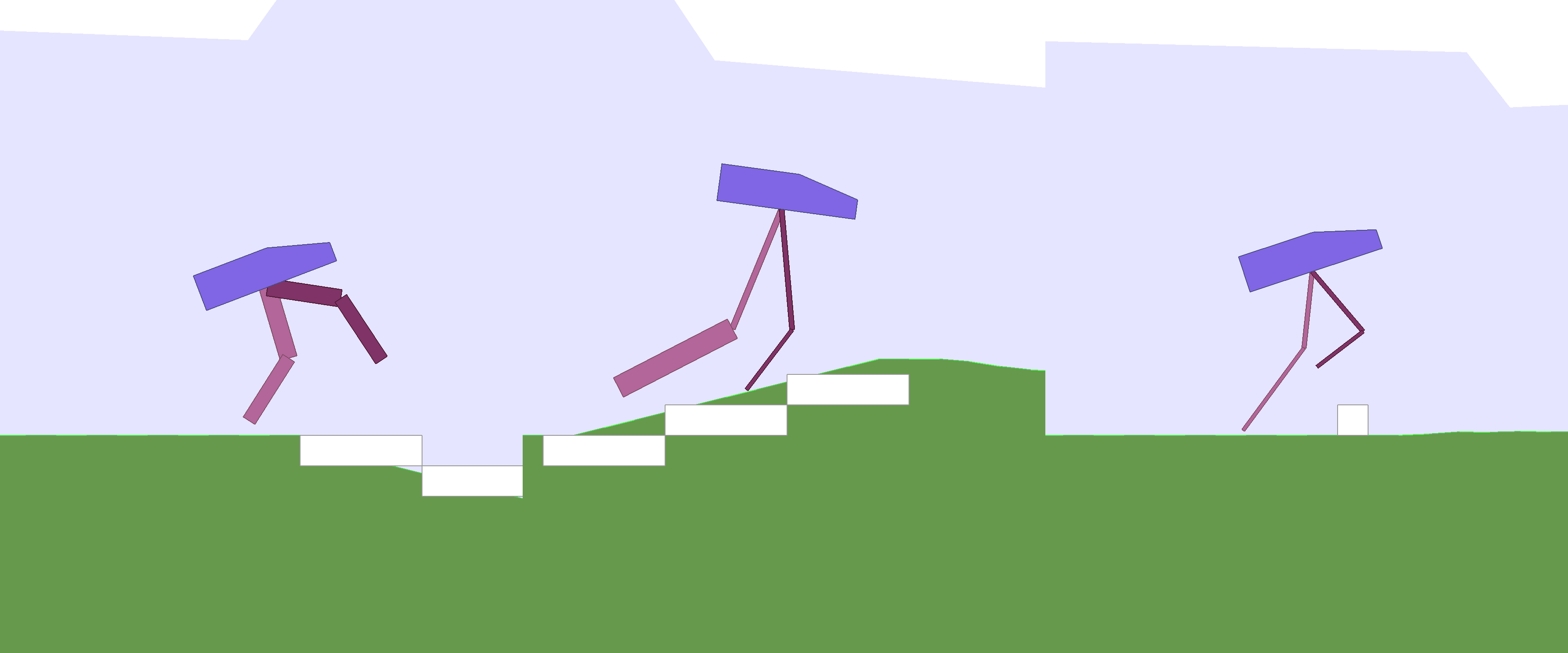
augmentbipedhard
augmentbipedhardsmalllegs
augmentbiped
augmentbipedsmalllegs
To train new models:
python train.py ENVNAME -n 96 -e 16 -t 2
Where 96 is the number of CPU cores you have on a cloud virtual machine (the actual number of workers will be multiplied by 2). The cumulative reward used to calculate the gradients in REINFORCE will be the average of 16 trials. The trained models will be saved in log/ENVNAME...best.json
MIT
If you find this work useful, we would appreciate a reference to our paper:
Reinforcement Learning for Improving Agent Design. David Ha. arXiv:1810.03779
@article{ha2018designrl,
title={Reinforcement Learning for Improving Agent Design},
author={Ha, David},
journal={arXiv preprint arXiv:1810.03779},
year={2018}
}