
Official implementation (PyTorch) of the paper:
Accurate 3D Object Detection using Energy-Based Models, CVPR Workshops 2021 [arXiv] [project].
Fredrik K. Gustafsson, Martin Danelljan, Thomas B. Schön.
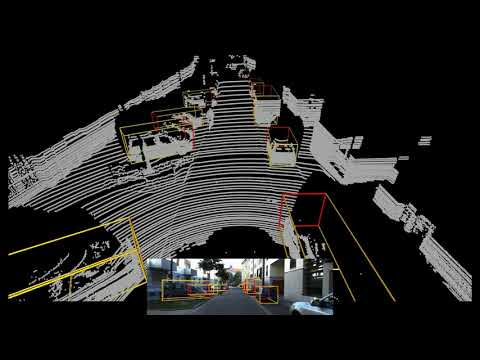
We apply energy-based models p(y|x; theta) to the task of 3D bounding box regression, extending the recent energy-based regression approach from 2D to 3D object detection. This is achieved by designing a differentiable pooling operator for 3D bounding boxes y, and adding an extra network branch to the state-of-the-art 3D object detector SA-SSD. We evaluate our proposed detector on the KITTI dataset and consistently outperform the SA-SSD baseline, demonstrating the potential of energy-based models for 3D object detection.
Youtube video with qualitative results:
If you find this work useful, please consider citing:
@inproceedings{gustafsson2020accurate,
title={Accurate 3D Object Detection using Energy-Based Models},
author={Gustafsson, Fredrik K and Danelljan, Martin and Sch{\"o}n, Thomas B},
booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops},
year={2021}
}
- The code is based on SA-SSD by @skyhehe123.
The code has been tested on Ubuntu 16.04. Note that I had to use exactly the same versions for pytorch (1.1.0) and spconv (1.0) as in https://github.com/skyhehe123/SA-SSD for the code to work.
- Installation:
$ pip install opencv-python
$ pip install Shapely
$ pip install mmcv==0.2.14 (NOTE! It did not work with the latest version)
$ pip install terminaltables
$ apt-get update
$ apt-get install -y libsm6 libxext6 libxrender-dev
$ pip install opencv-python
$ pip install torch==1.1.0 torchvision==0.3.0 (NOTE! pytorch 1.1.0)
$ pip install numba
$ pip install Cython
$ pip install pycocotools
$ pip install scikit-image
-
- Install spconv 1.0 (NOTE! spconv 1.0):
$ cd ebms_3dod/3dod
$ git clone https://github.com/traveller59/spconv.git --recursive
$ cd spconv
$ git checkout 8da6f967fb9a054d8870c3515b1b44eca2103634 (this is the commit corresponding to spconv 1.0)
$ apt-get update
$ apt-get install libboost-all-dev
$ python setup.py bdist_wheel
$ cd dist
$ pip install spconv-1.0-cp36-cp36m-linux_x86_64.whl (spconv-1.0-cp36-cp36m-linux_x86_64.whl was the name of the file at least for me)
$ cd ebms_3dod/3dod
$ pip install pybind11
$ cd mmdet/ops/points_op
$ python setup.py build_ext --inplace
$ cd mmdet/ops/pointnet2
$ python setup.py build_ext --inplace
$ cd mmdet/ops/iou3d
$ python setup.py build_ext --inplace
- Download the pretrained SA-SSD model from https://drive.google.com/file/d/1WJnJDMOeNKszdZH3P077wKXcoty7XOUb/view, place the file epoch_50.pth in ebms_3dod/3dod.
- Create the folders ebms_3dod/3dod/data and ebms_3dod/3dod/data/KITTI.
- Download the KITTI dataset, place the "ImageSets" and "object" folders in ebms_3dod/3dod/data/KITTI.
- Create cropped point clouds and sample for data augmentation:
-
- Create the folder ebms_3dod/3dod/data/KITTI/object/training/velodyne_reduced.
-
- Create the folder ebms_3dod/3dod/data/KITTI/object/testing/velodyne_reduced.
-
- $ cd ebms_3dod/3dod
-
- $ python create_data.py
- Train model on KITTI train:
-
- $ cd ebms_3dod/3dod
-
- $ python train.py configs/car_cfg20.py
- Evaluate model on KITTI val:
-
- $ cd ebms_3dod/3dod
-
- $ python eval.py configs/car_cfg20_eval_ebm3.py saved_model_vehicle20/checkpoint_epoch_80.pth
- Run model on KITTI test:
-
- $ cd ebms_3dod/3dod
-
- $ python eval.py configs/car_cfg20_eval_ebm3_test.py saved_model_vehicle20/checkpoint_epoch_80.pth --out saved_model_vehicle20 (this creates 000000.txt - 007517.txt in ebms_3dod/3dod/saved_model_vehicle20)
-
- To evaluate on KITTI test:
-
-
- Download all 7518 files, mark all files and compress to a zip file.
-
-
-
- Upload the zip file to the KITTI evaluation server.
-
-
3dod/mmdet/models/detectors/single_stage.py: Code for defining the EBM network branch f_\theta(x, y), the EBM loss and the gradient-based prediction procedure.
-
3dod/viz_video.py: Code for creating the Youtube video with qualitative results.
-
Also see ebms_regression for an illustrative 1D regression problem.
- Model trained on KITTI train ($ python train.py configs/car_cfg20.py): https://drive.google.com/file/d/1hWKUZ4rx9h6Med3pI4A4wbHXEOey-8zI/view?usp=sharing
- Evaluate pretrained model on KITTI val:
-
- Download the file checkpoint_epoch_80.pth from above and place in ebms_3dod/3dod/pretrained.
-
- $ cd ebms_3dod/3dod
-
- $ python eval.py configs/car_cfg20_eval_ebm3.py pretrained/checkpoint_epoch_80.pth
-
- Expected output:
Car AP@0.90, 0.90, 0.90:
bbox AP:39.30, 31.42, 29.55
bev AP:26.60, 22.03, 19.48
3d AP:3.45, 2.74, 2.26
aos AP:39.30, 31.39, 29.51
Car AP@0.85, 0.85, 0.85:
bbox AP:82.14, 67.97, 64.99
bev AP:68.40, 58.62, 54.48
3d AP:31.02, 23.91, 21.95
aos AP:82.08, 67.89, 64.87
Car AP@0.80, 0.80, 0.80:
bbox AP:95.75, 86.92, 82.20
bev AP:88.31, 80.06, 77.25
3d AP:66.70, 54.32, 51.36
aos AP:95.69, 86.79, 81.99
Car AP@0.75, 0.75, 0.75:
bbox AP:99.05, 93.37, 90.79
bev AP:95.47, 87.54, 84.88
3d AP:87.85, 74.96, 71.95
aos AP:98.99, 93.18, 90.45
Car AP@0.70, 0.70, 0.70:
bbox AP:99.38, 96.16, 93.69
bev AP:96.62, 92.93, 90.43
3d AP:95.50, 86.83, 82.23
aos AP:99.32, 95.89, 93.25
Car AP@0.50, 0.50, 0.50:
bbox AP:99.38, 96.16, 93.69
bev AP:99.41, 96.35, 93.86
3d AP:99.39, 96.29, 93.81
aos AP:99.32, 95.89, 93.25
- Run pretrained model on KITTI test:
-
- Download the file checkpoint_epoch_80.pth from above and place in ebms_3dod/3dod/pretrained.
-
- $ cd ebms_3dod/3dod
-
- $ python eval.py configs/car_cfg20_eval_ebm3_test.py pretrained/checkpoint_epoch_80.pth --out pretrained (this creates 000000.txt - 007517.txt in ebms_3dod/3dod/pretrained)
-
- To evaluate on KITTI test:
-
-
- Download all 7518 files, mark all files and compress to a zip file.
-
-
-
- Upload the zip file to the KITTI evaluation server.
-
-
-
- Expexted output:
-
Benchmark Easy Moderate Hard
Car (Detection) 96.81 % 93.54 % 88.33 %
Car (Orientation) 96.39 % 92.88 % 87.58 %
Car (3D Detection) 91.05 % 80.12 % 72.78 %
Car (Bird's Eye View) 95.64 % 89.86 % 84.56 %