University of Michigan ROB530 WIN19 TEAM6 Project
Dynamic ORB-SLAM is based on ORB-SLAM2 and tries to make it robust to dynamic and feature-sparse environment. We proposed a Dynamic Feature Filter (DFF) to reject dynamic obejcts in the environment and Dynamic Outlier Thresholding Algorithm (DOTA) to robustify tracking in feature-sparse environment.
Please refer to our paper for detailed description of our methods for improving ORB-SLAM2.
-
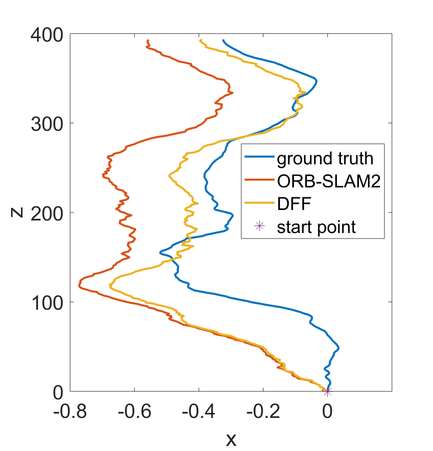
Result of running ORB-SLAM2 with DFF on KITTI sequence 04:
-
Result of running ORB-SLAM2 with DOTA on Devon Island sequence 00:



The following installation and examples have been tested on Ubuntu 16.04.
Clone the repository:
git clone https://github.com/FeliksBrant/Dynamic_ORB-SLAM
Follow section 2 to install all Prerequistes for ORB-SLAM2.
We provide a clean.sh to remove all pre-built files to have a clean environment for building ORB-SLAM2. Execute:
cd ORB_SLAM2
chmod +x clean.sh
./clean.sh
Then run the script build.sh to build Thirdparty libraries and ORB-SLAM2. Please make sure you have installed all required dependencies (see section 2). Execute:
cd ORB_SLAM2
chmod +x build.sh
./build.sh
Note if you are running Ubuntu on Virtual Machine, you might face problems like virtual memory exhausted: cannot allocate memory or internal compiler error: Killed (program cc1plus). You might be able to fix them following this magic solution.
This will create libORB_SLAM2.so at lib folder and the executables mono_tum, mono_kitti, rgbd_tum, stereo_kitti, mono_euroc and stereo_euroc in Examples folder.
After you have succefully built after following previous sections, you can try following examples that demonstrate the main breakthroughs of our project.
For the following examples to run, you need to first unzip the file ORBvoc.txt.tar.gz inside folder ORB_SLAM2/Vocabulary/.
We provide example to test on KITTI sequence 04. To try the example, execute:
cd ORB_SLAM2/
./Examples/Stereo/stereo_kitti Vocabulary/ORBvoc.txt Examples/Stereo/KITTI04-12.yaml ../datasets/KITTI/04/
After test finishes, a file named CameraTrajectory.txt will be created in ORB_SLAM2 folder. It records the robot trajectory generated from the test.
You can also log map points with their estimated velocity. To do so, you need to uncomment line 570 in src/Tracking.cc and line 1542 in src/ORBmatcher.cc. Then you will need to rebuilt by executing
cd ORB_SLAM2
./build.sh
Then information will be output in the terminal. You can log them to a file by executing
cd ORB_SLAM2/
./Examples/Stereo/stereo_kitti Vocabulary/ORBvoc.txt Examples/Stereo/KITTI04-12.yaml ../datasets/KITTI/04/ > %PATH_TO_YOUR_FILE/example_log.csv
log.csv will record below information in SI units:
- frame number and timestamp
- map point location in world coordinate in current frame,
(xw_,yw_,zw_) - map point location in world coordinate in current SLAM map,
(xw,yw,zw) - map point speed estimation baesd on current frame and current SLAM map,
e_vel - map point speed estimation using DFF,
e_vel_smoothed
To analyze the result, we provide two Matlab scripts. To run them with MATLAB, first
cd analysis/KITTI
In this folder, plot_vel_histogram.m randomly selects some frames from KITTI 04 sequence and plot the histogram of map points' velocities estimation with and without DFF. smooth_test_04.m plots trajectory obtained from ORB-SLAM2 with DFF, original ORB-SLAM2 and ground truth. Their translational and rotational root mean square error are also calculated.
We provide example to test on Devon Island sequence 00. To try the example, execute:
cd ORB_SLAM2/
./Examples/Stereo/stereo_devon Vocabulary/ORBvoc.txt Examples/Stereo/Devon_grey.yaml ../datasets/devon_dataset_grey/sequences/00/
After test finishes, a file named CameraTrajectory.txt will be created in ORB_SLAM2 folder. It records the robot trajectory generated from the test.
To analyze the result, we provide two Matlab scripts. To run them with MATLAB, first
cd analysis/Devon-Island
In this folder, Plot_Devon_Trajectory.m will plot specified CameraTrajectory.txt files against the GPS ground truth trajectory.
Like so many projects, this effort has roots in many places. Special thanks to Raul Mur-Artal and many on their work on building state-of-art ORB-SLAM2. And thanks of course to our instructor Maani Ghaffari for teaching and providing insights on many topics on SLAM.