
Kimera is a C++ library for real-time metric-semantic simultaneous localization and mapping, which uses camera images and inertial data to build a semantically annotated 3D mesh of the environment. Kimera is modular, ROS-enabled, and runs on a CPU.
Kimera comprises four modules:
- A fast and accurate Visual Inertial Odometry (VIO) pipeline (Kimera-VIO)
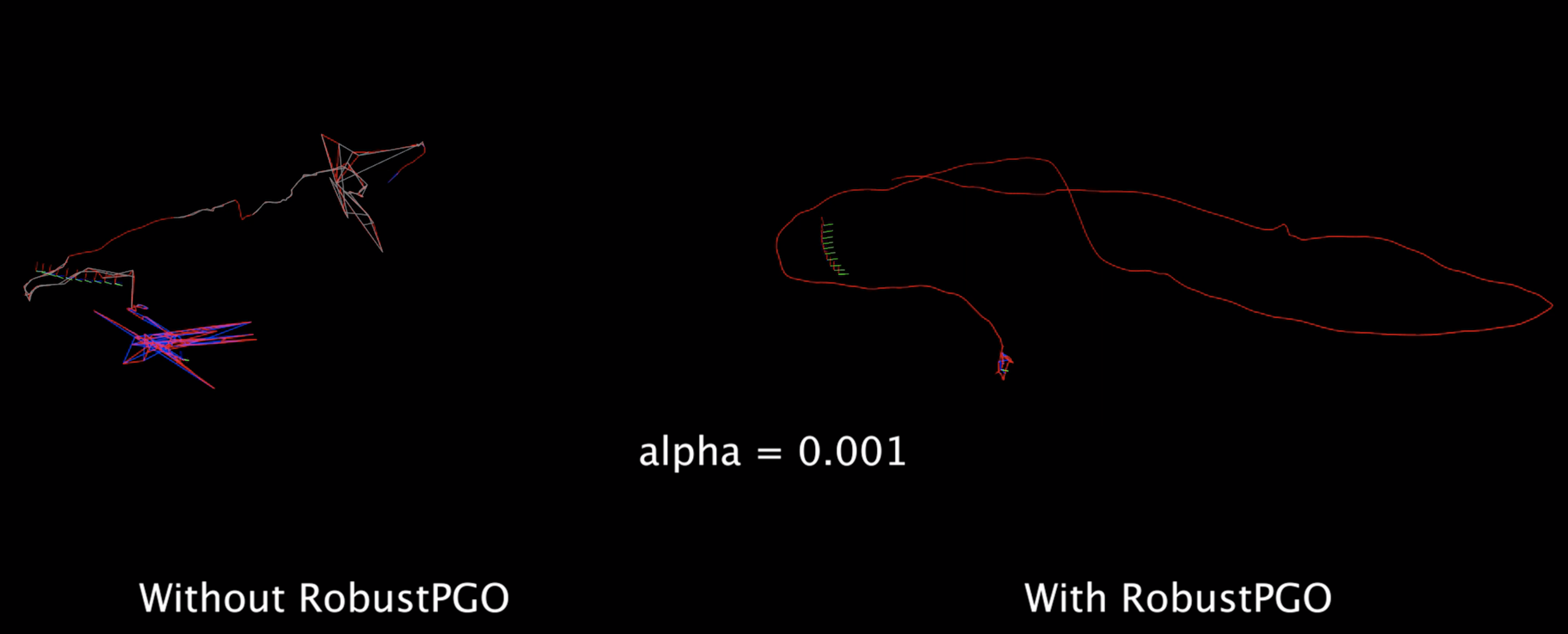
- A full SLAM implementation based on Robust Pose Graph Optimization (Kimera-RPGO)
- A per-frame and multi-frame 3D mesh generator (Kimera-Mesher)
- And a generator of semantically annotated 3D meshes (Kimera-Semantics)
Click on the following links to install Kimera's modules and get started! It is very easy to install!

If you found any of the above modules useful, we would really appreciate if you could cite our work:
- [1] A. Rosinol, T. Sattler, M. Pollefeys, L. Carlone. Incremental Visual-Inertial 3D Mesh Generation with Structural Regularities. IEEE Int. Conf. on Robotics and Automation (ICRA), 2019. arXiv:1903.01067
@InProceedings{Rosinol19icra-incremental,
title = {Incremental visual-inertial 3d mesh generation with structural regularities},
author = {Rosinol, Antoni and Sattler, Torsten and Pollefeys, Marc and Carlone, Luca},
year = {2019},
booktitle = {2019 International Conference on Robotics and Automation (ICRA)},
pdf = {https://arxiv.org/pdf/1903.01067.pdf}
}- [2] A. Rosinol, M. Abate, Y. Chang, L. Carlone, Kimera: an Open-Source Library for Real-Time Metric-Semantic Localization and Mapping. IEEE Intl. Conf. on Robotics and Automation (ICRA), 2020. arXiv:1910.02490.
@InProceedings{Rosinol20icra-Kimera,
title = {Kimera: an Open-Source Library for Real-Time Metric-Semantic Localization and Mapping},
author = {Rosinol, Antoni and Abate, Marcus and Chang, Yun and Carlone, Luca},
year = {2020},
booktitle = {IEEE Intl. Conf. on Robotics and Automation (ICRA)},
url = {https://github.com/MIT-SPARK/Kimera},
pdf = {https://arxiv.org/pdf/1910.02490.pdf}
}- [3] A. Rosinol, A. Gupta, M. Abate, J. Shi, L. Carlone. 3D Dynamic Scene Graphs: Actionable Spatial Perception with Places, Objects, and Humans. Robotics: Science and Systems (RSS), 2020. arXiv:2002.06289.
@InProceedings{Rosinol20rss-dynamicSceneGraphs,
title = {{3D} Dynamic Scene Graphs: Actionable Spatial Perception with Places, Objects, and Humans},
author = {A. Rosinol and A. Gupta and M. Abate and J. Shi and L. Carlone},
year = {2020},
booktitle = {Robotics: Science and Systems (RSS)},
pdf = {https://arxiv.org/pdf/2002.06289.pdf}
}Kimera was partially funded by the DCIST (Distributed and Collaborative Intelligent Systems and Technology) Collaborative Research Alliance.