10_ARMv8_异常处理(一) - 入口与返回、栈选择、异常向量表
carloscn opened this issue · comments

10_ARMv8_异常处理
终于,我们从ARMv8的一些汇编指令的学习当中出来了,开始研究ARMv8体系架构的设计。这里面的机制十分的重要,所以不得不依赖笨叔的视频,同样自己也要阅读ARMv8的手册,希望自己一字一句的去理解,不懂的去搜索,争取把这部分知识补充完整。
1. ARMv8 fundamentals1
这部分在笨叔的视频和讲义里面只是粗略的讲了一下high-level的版图设计,但我觉得这个十分重要,没有这个基础后面很难去理解异常处理的过程,而且在high-level上面,人为的设定了很多规则,我觉得有必要整理一下。大纲总结如下:
1.1 EL/PL/secure/non-secure
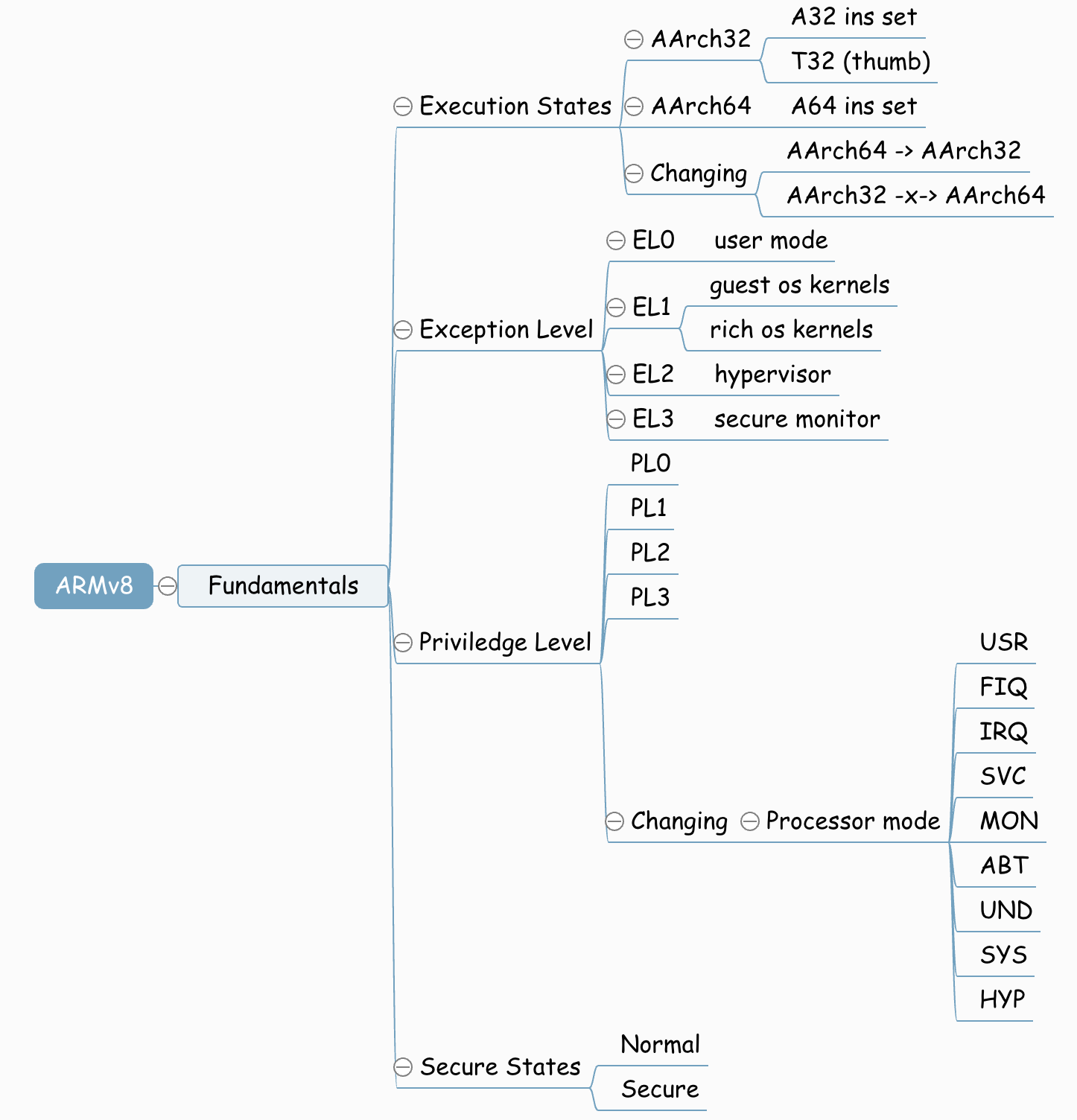
这里主要提到了一些概念和术语,我们需要理解这些概念还背后术语的一些潜在的设计意义,挖掘出设计者的意图。文档在这一章开篇就提到:异常等级(Exception level)、特权等级(Privilege level)。ARMv8内部包含4个异常等级:
- EL0:普通用户的应用程序
- EL1:典型的操作系统内核,这个等级被称为“特权等级”(privileged)
- EL2:hypervisor
- EL3:Low-level固件,例如安全监视器 Secure monitor,最高权限
这里就有些需要注意的了,特权等级是在ARMv7里面的概念,ARMv8属于借鉴过来,PLn对应ELn。
ARMv8提供了两个安全状态(Secure States),一个叫普通世界(normal world),一个叫安全世界(secure world),这两个世界并行的运行在同一个硬件设备上面,安全世界的工作重心是抵抗软件和硬件的攻击。在EL3下的secure monitor,游走于secure world和normal world。
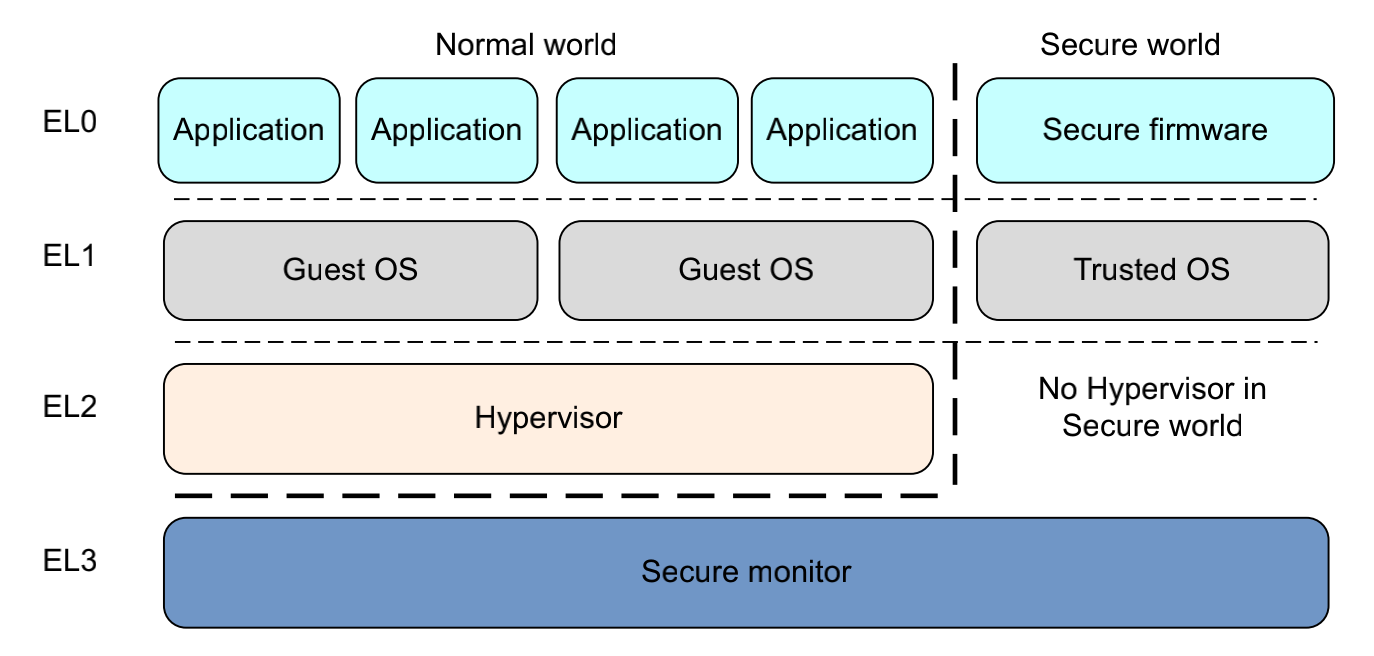
在normal world的hypervisor(VMM)代码运行在系统上并且管理着多个Guest OS,所以每一个操作系统都运行在VMM上面,每个操作系统在同一时间都不知道有其他操作系统在运行。
-
Guest OS kernels,这部分分为两类:
- 一般性的操作系统Linux/Windows
- 在运行hypervisor的情况下,还有一个Rich OS kernels也作为Guest OS。我猜测,比如OPTEE-OS。
-
Hypervisor,总是normal world的,when present,主要是给rich os kernels提供服务。
-
Secure Firmware,这段程序必须运行在boot时间,用于初始化trusted os,平台,还有secure monitor。
-
Trusted OS,在EL1和Guest OS并行运行,提供一个runtime环境执行安全应用。OPTEE-OS
1.2 Execution States
ARMv8定义了两个执行状态,aarch64和aarch32。这两个执行状态和异常等级没有概念上面的交织,也就是aarch64和aarch32都有相应的异常等级和特权模式。在aarch64执行状态时,使用A64指令,在aarch32执行状态,使用A32或者T32(Thumb)指令集。
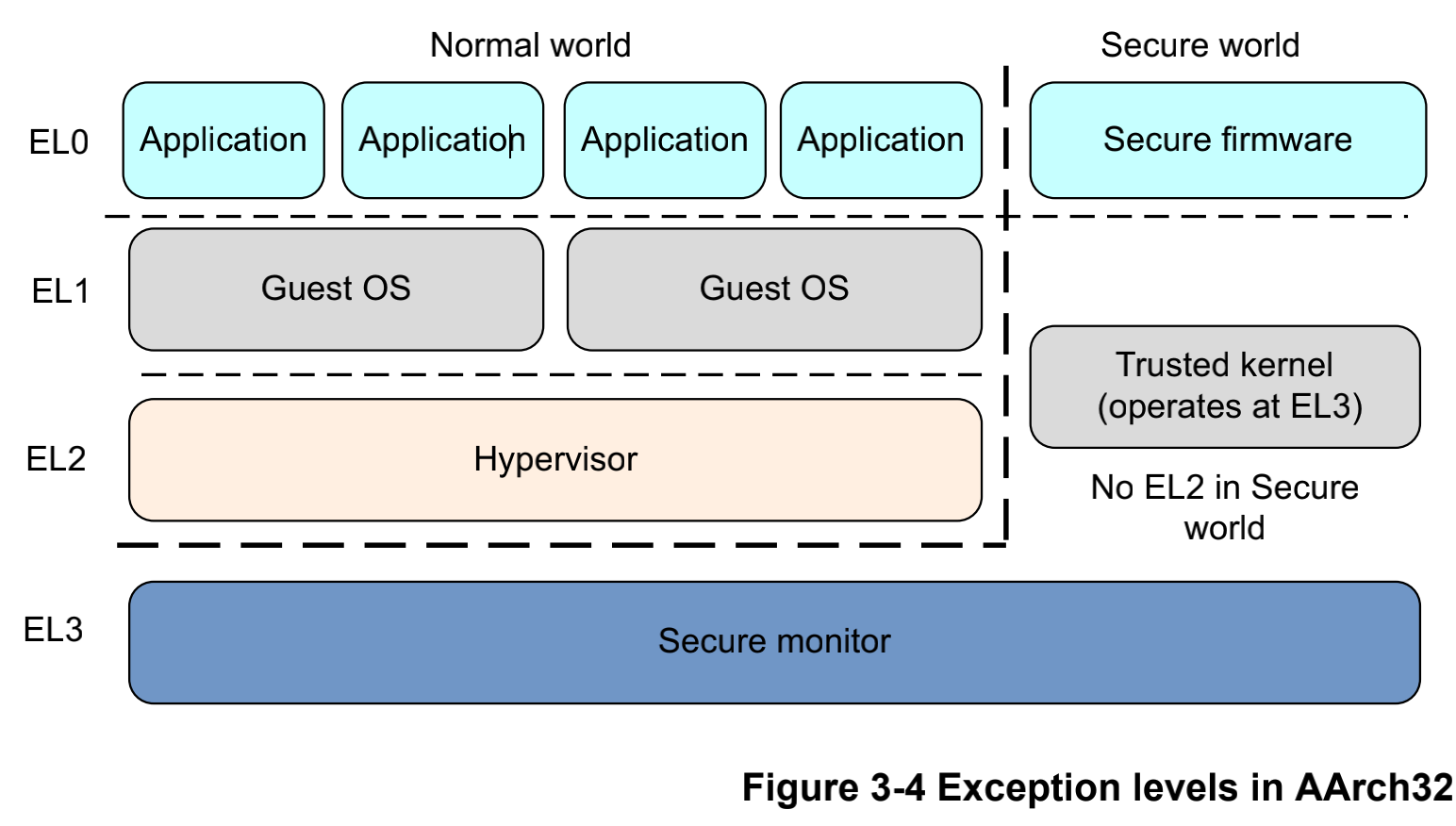
AArch32模式,有一点不同的是关于trust-os的位置,trusted-os软件执行在secure EL3,在aarch64执行模式,是执行在EL1中的。ARMv7和aarch32很像。
1.3 Changing Exception levels
对于异常模式的变迁,ARMv8和ARMv72是一致的。异常模式的变迁不光是EL层级的变迁,在EL层级里面还有很多处理器的模式(mode)。这里有个术语叫做[take an exception],可以理解为异常的激发。当take an exception的时候,处理器的模式(mode)就会被改变。不同的EL层级内包含不同的模式集合。我理解这部分在ARMv8里面已经拿掉了,似乎没有这个概念,全部都被异常处理cover。
| Mode | Function | Securitystate | Privilegelevel |
|---|---|---|---|
| User (USR) | Unprivileged mode in which most applications run | Both | PL0 |
| FIQ | Entered on an FIQ interrupt exception | Both | PL1 |
| IRQ | Entered on an IRQ interrupt exception | Both | PL1 |
| Supervisor(SVC) | Entered on reset or when a Supervisor Call instruction (SVC) is executed |
Both | PL1 |
| Monitor (MON) | Entered when the SMC instruction (Secure Monitor Call) is executed or when the processor takes an exception which is configured for secure handling.Provided to support switching between Secure and Non-secure states. |
Secure only | PL1 |
| Abort (ABT) | Entered on a memory access exception | Both | PL1 |
| Undef (UND) | Entered when an undefined instruction is executed | Both | PL1 |
| System (SYS) | Privileged mode, sharing the register view with User mode | Both | PL1 |
| Hyp (HYP) | Entered by the Hypervisor Call and Hyp Trap exceptions. | Non-secure only | PL2 |
ARM64处理器内部的中断分为两种,FIQ和IRQ,FIQ叫快速中断请求,IRQ就是普通的中断请求。FIQ的优先级高于IRQ。
在ARM64处理器中异常模式有以下规则:
- 升权:向EL3方向变迁,视为升权。
- 异常不能被带入比其低的异常等级。
- 在EL0没有异常处理机制,异常处理必须在其更高的异常等级处理。
- 异常会造成程序执行流改变。通常异常处理有一个向量表需要循序,而有特例可以不需要遵循异常向量表:
- IRQ/FIQ
- abort memory system
- 未定义指令
- 系统调用
- traps EL1和EL2
- 异常处理结束之后返回前一个异常等级需要执行
ERET指令 ERET之后只能保留在本层或者是更低的层级。- 安全状态无法改变EL层级。
1.4 Changing execution state
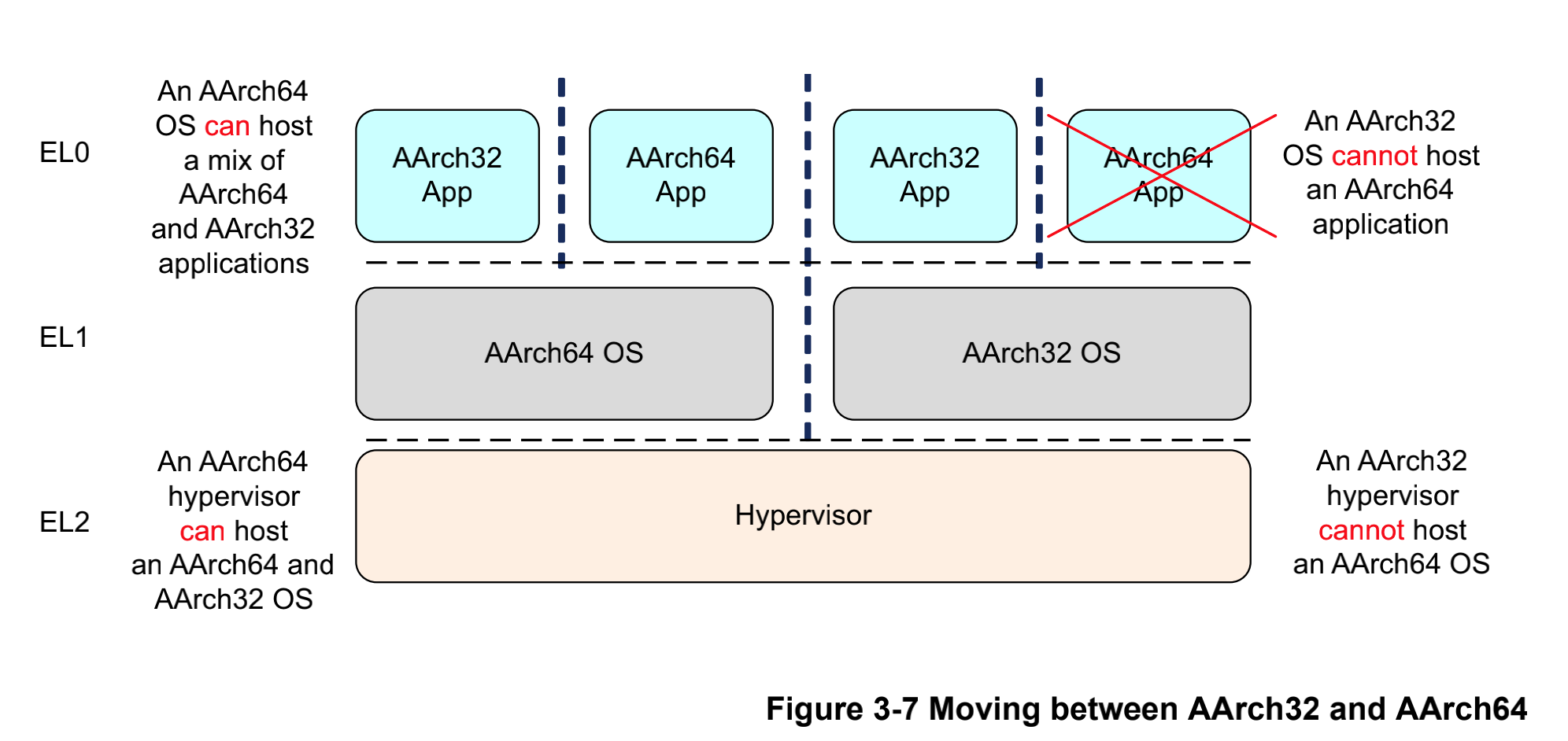
32位的应用程序可以运行在64位的上面,这个在x86的架构似乎也能看见。在ARM64处理器上也是支持这样的使用场景的。这样的执行是有个条件的,也就是在执行32位程序的时候,必须让处理器处于AArch32的执行状态。为了实现这样的执行,处理器只能在更高的EL层级去执行32位的程序。首先,32位的应用程序在EL0产生一个SVC指令向supervisor call,接着会产生一个IRQ,这个IRQ就会切换到AARCH64内的EL1,等着程序运行完毕之后任务ERET到EL0。32/64混合的程序没办法在ARM64上运行,还有64位程序就没办法在32位系统上运行了。
由于在执行32位程序的时候,处理器会升一个EL,因此即使AArch64状态能够支持AArch32,但是是在低一级的权利模式。一个AArch64的操作系统能够运行32/64两种类型的应用,hypervisor也是一样,AArch64的hypervisor能够管理AArch32和AArch64的guest操作系统。AArch32的并没有这个能力。
2. ARMv8 exception handling
在ARM的世界我们应该纠正一个概念,“中断”。通用的中断的定义就是可以阻止正常软件流程执行的中断。然而在ARM的术语里面,不能仅仅用中断来表示中断,我们需要更上一层的定义,异常(Exception)。异常包含狭义的中断,也包含条件变量(conditions)或者是系统事件(system event),这些行为都有专门的异常处理函数来处理。在ARCH64里面有三类异常,中断(interrupts),中止(aborts) 和复位(reset)。
2.1 exception types
interrupts
在AArch64体系架构中有两种类型的中断,IRQ和FIQ。FIQ的优先级高于IRQ,这部分中断设计的时候我们再说。即便我们对于中断的概念已经很熟悉了,但这里面需要澄清几个有关中断的概念。
- 中断线(request line)3:这个是对处理器而言的,是中断控制器的输入。
- 中断向量表(vector table):中断名单,操作系统实现,内部包含中断线对应的IRQ号。
对于触发中断,在CPU上有专门的动词术语,assert一个中断,take一个异常。中断线由外部外设assert,中断线的信号被接入到中断控制器,中断控制器根据中断优先级判断先发出哪些信号,再根据中断向量表查找到中断处理函数的地址。由于中断并非执行在给定时间内,因此中断属于异步异常。
aborts
同样包含两列aborts,取指失败(Instruction Aborts)或者是访问数据失败(Data Aborts)。
在内存上,发生这种异常的场景可能有两种,在访问内存时,外部存储器返回一个错误,或者指定访问的地址没有关联到真实的内存中(MMU产生该错误,一个操作系统可以使用MMU abort动态的分配内存给应用程序)。
在指令上,aborts发生在取指还未执行的时候。data abort发生在存储和加载指令。
abort异常属于同步异常。
reset
reset异常有着最高的异常等级。当异常发生的时候ARM处理器就会跳转到指令所在的位置。RVBAR_ELn包含跳转地址,n应该是该处理器的最高权限,armv8里面就应该为n=3。该异常不可屏蔽,不可禁止,并且尝尝执行在上电后的初始化的时候。
Exception generating instructions
一些异常需要由CPU外部的触发中断线间接性的塑造异常,一些系统调用指令也可以直接的产生异常,这些指令通常会向处理器请求一些运行在更高权限环境中的服务。
- 管理员权限请求(Supervisor Call, SVC):用户空间请求操作系统内核的服务,EL0 -> EL1
- 虚拟化权限请求(Hypervisor Call, HVC):操作系统内核请求虚拟化监视器服务,EL1->EL2
- 安全监视器权限请求(Secure Monitor Call,SMC):非安全世界请求进入安全世界的服务,Normal world -> secure world
有几个需要注意的点:
- 通常情况下,如果在EL0进行请求,那么异常会发生在EL1,有种特殊情况,就是
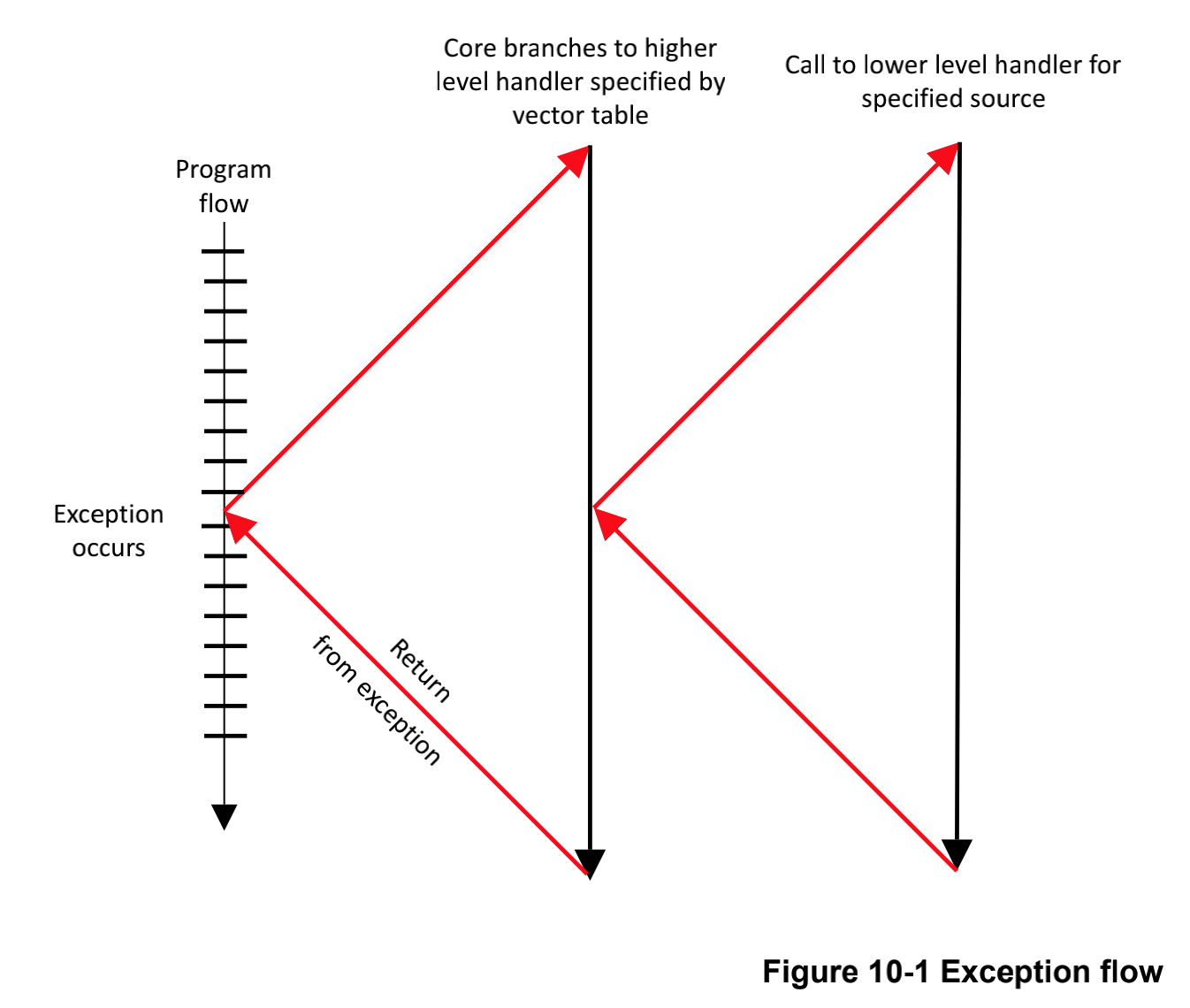
HCR_EL2.TGE被置位的时候,这个时候异常会发生在EL2。 - 异常和中断类似都有个异常向量表。程序发生异常的时候,CPU会会跳转到到更高层级的handler里面,查找异常向量表,找到本级异常的handler的地址,再跳转过去。这里先留个疑问,为什么要找到lower level的handler?
2.2 中断嵌套
我们要注意一个比较重要的概念,中断嵌套(中断抢占),从定义上来看4:
中断嵌套指中断系统正在执行一个中断服务L时,有另一个优先级更高的中断H触发,这时中断系统会暂时中止当前正在执行低优先级中断服务程序L,而去处理高级别中断H,待处理完毕,再返回被中断了的中断服务程序L继续执行。
从处理器的角度来看,ARM64是支持中断嵌套的,我们可以从三个角度来看5:
- ARM Core支持中断嵌套吗?支持!
- GIC中断控制器支持中断嵌套吗?支持!
- Linux Kernel有没有中断嵌套的使用呢?不支持!
- RTOS kernel哟没有中断嵌套的使用?支持!
2.2.1 ARM Core的中断嵌套
首先来看ARM CORE支持中断嵌套吗?答案 支持! 但是是有一个前提,在进入中断处理时,PSTATE的I、F、A等比特位是MASK的,软件中需要主动unmask后,那么就可以中断嵌套了。如下图所示,正是ARM Core支持中断嵌套的一个示例(或者叫模型):
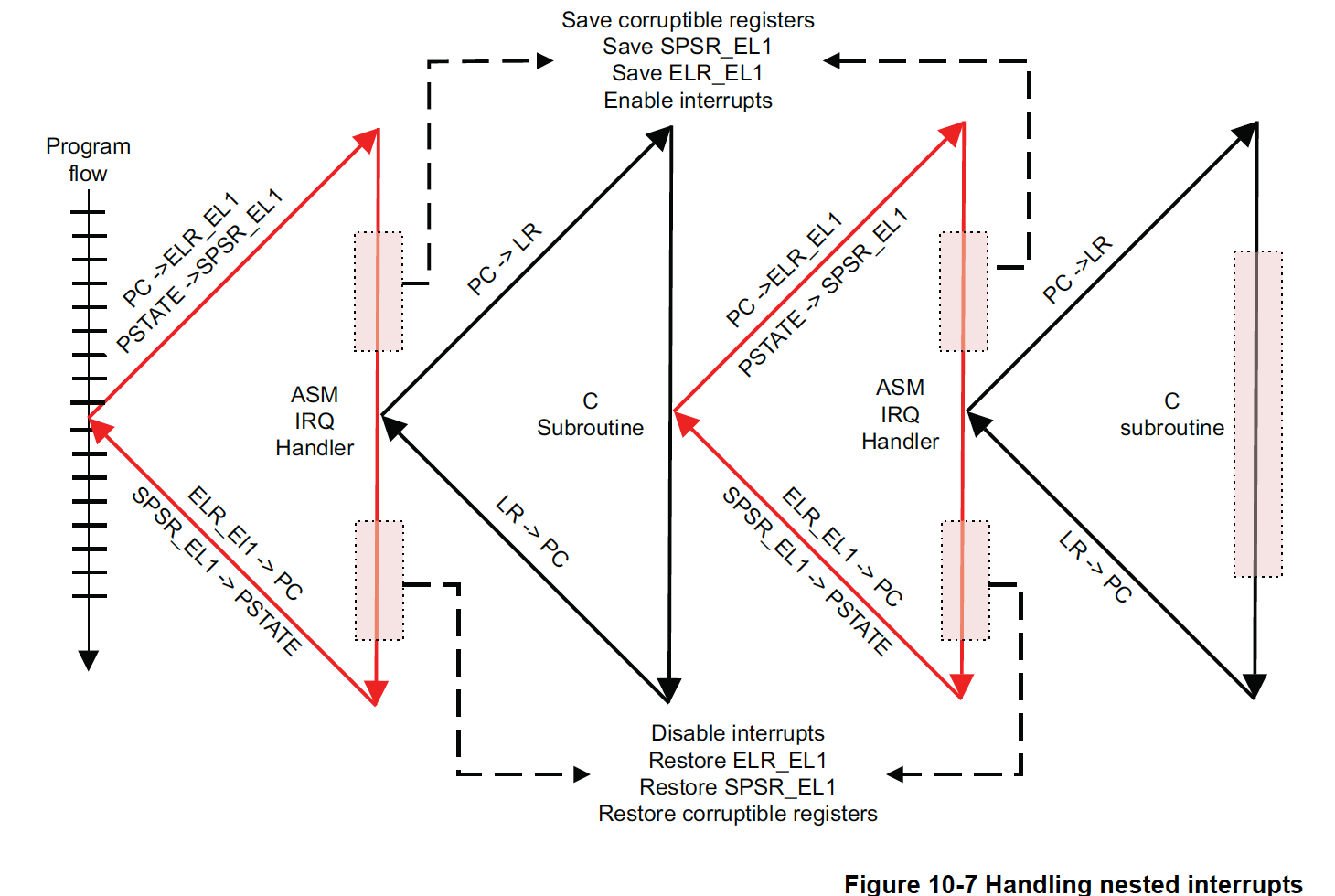
每次调用要保存中断的上下文。
2.2.2 GIC中断控制器中断嵌套
继续看GIC中断控制器支持中断嵌套吗?答案 支持中断抢占,支持中断嵌套。介绍以下优先级和抢占的概念:
- 每个 INTID(中断号) 都有一个优先级(用寄存器
GICD_IPRIORITYn或GICR_IPRIORITYn表示),它是一个 8 位无符号值。 0x00 是可能的最高优先级,0xFF 是可能的最低优先级。 - 每个 PE 在其 CPU interface中都有一个优先级掩码寄存器 (
ICC_PMR_EL1)。 该寄存器设置将中断转发到该 PE 所需的最低优先级。 只有优先级高于寄存器值的中断才会发送给 PE - GICv3具有运行优先级的概念。 当 PE 响应中断时,它的运行优先级变为该中断的优先级。 当 PE 写入 EOI 寄存器之一时,运行优先级将返回其先前值。 如果 PE 尚未处理中断,则运行优先级为空闲优先级 (0xFF)。 只有优先级高于运行优先级的中断才能抢占当前中断。
GIC中断控制器的中断嵌套是可以配置的。分为Without preemption和With preemption两种模式:
- 在Without preemption的情况下,高优先级的中断无法抢占正在active的中断,只能等active的中断执行完了、返回了,高优先级的中断才能发生"抢占"(这里还说抢占,合适吗? 此种情况应属于抢占pendding中断);
- With preemption,描述的其实就是:一个中断正在执行,然后另一个更高优先级的中断打断了它, 这也就是正是我们所说的中断嵌套。
那么对于一个gicv3的IP,优先级肯定是有的,它到底是Without preemption 还是With preemption呢? 如何配置的呢?
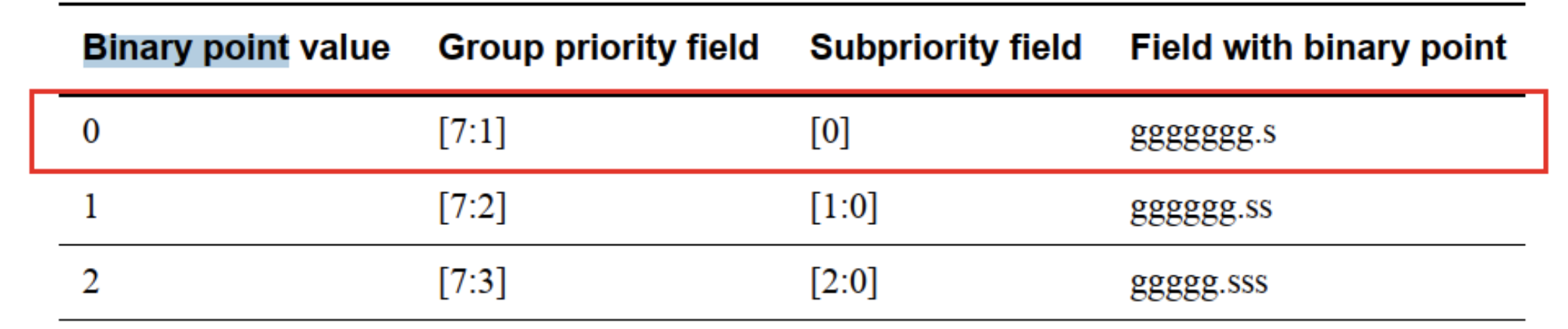
请查略ICC_BPRn_EL1寄存器,该寄存器定义优先级值字段分成两部分的点,即组优先级字段和子优先级字段。 组优先级字段确定组 1 中断抢占。 换句白话来解释就是,中断优先级被分成了两部分,如下图所示,ICC_BPRn_EL1寄存器的BIT[2:0]定义了下图中的N的值6:
Set priority mask and binary point registers. The CPU interface contains the Priority Mask register (ICC_PMR_EL1) and the Binary Point registers (ICC_BPRn_EL1). The Priority Mask sets the minimum priority an interrupt must have in order to be forwarded to the PE. The Binary Point register is used for priority grouping and preemption. The use of both of these registers is described in more detail in Chapter 5.

2.2.3 Linux Kernel and RTOS
Linux Kernel
继续看Linux Kernel操作系统有没有使用中断嵌套?答案 没有使用!
首先查看ICC_BPRn_EL1寄存器的配置:
https://elixir.bootlin.com/linux/v5.13.19/source/drivers/irqchip/irq-gic-v3.c#L1005

写入的是0,也就是意味着,N=0, 即下图的第一行,也就是说抢占是开启的。
继续看,针对每一个 INTID(中断号) 的priority的配置,如下所示,在gic初始化阶段,给每一个 INTID(中断号) 都配置成了一样的优先级,值位0XA5。 也就是所有中断的优先级都是一样的。
https://elixir.bootlin.com/linux/v5.13.19/source/drivers/irqchip/irq-gic-v3.c#L803

事实上,在gicv3代码中,提供了一个接口,可以单独针对某一中断设置优先级。查略该函数用途,仅仅是为NMI中断设置的(注:Linux Kernel中armv8体系目前还没有该中断,ARMV9新增了一类NMI中断),其值为0Xa5 & 0x7f = 0x25,该值小于0XA0,所有该优先级大于其它中断的优先级。
https://elixir.bootlin.com/linux/v5.13.19/source/drivers/irqchip/irq-gic-v3.c#L460

##### RTOS的中断抢占(ARM Cortex-CM3)478
目前比较流行的几种嵌入式实时操作系统有uC/OS、RT-Thread、FreeRTOS等,对外都宣称它们是嵌入式实时操作系统,那么什么叫实时呢?所谓【实时】 其实就是【及时】,能够及时的处理各种任务和中断,而如何实现【实时/及时】呢,本质上就是要支持:高优先级任务/中断能够抢占低优先级任务/中断,这里的【抢占】本质上就是【中断嵌套】。
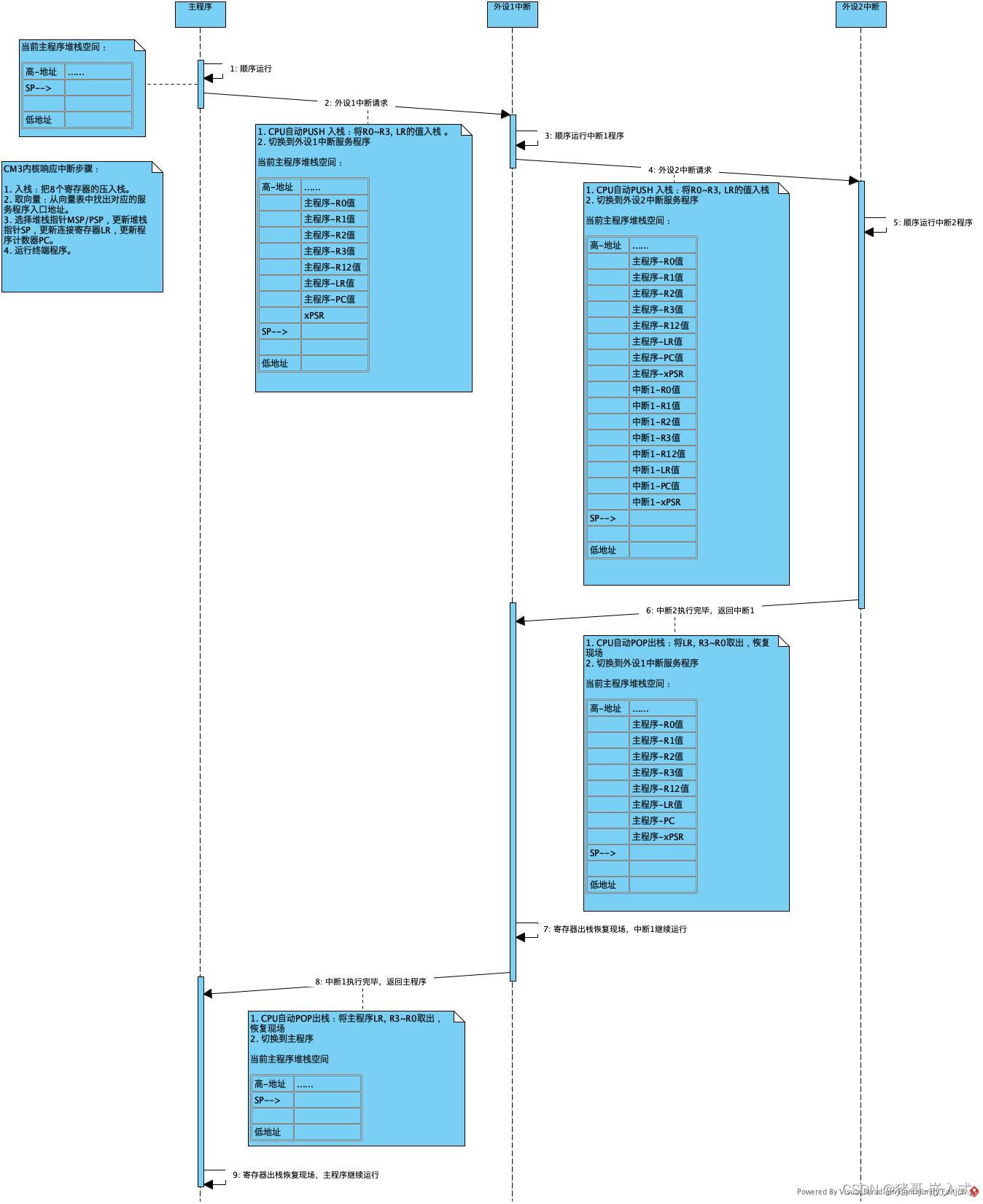
关于RTOS系统如何驱动CPU进行中断嵌套,参考78。内部使用了就绪链表的结构体,这部分暂时不在ARMv8中展开讨论。
Exception handling registers9
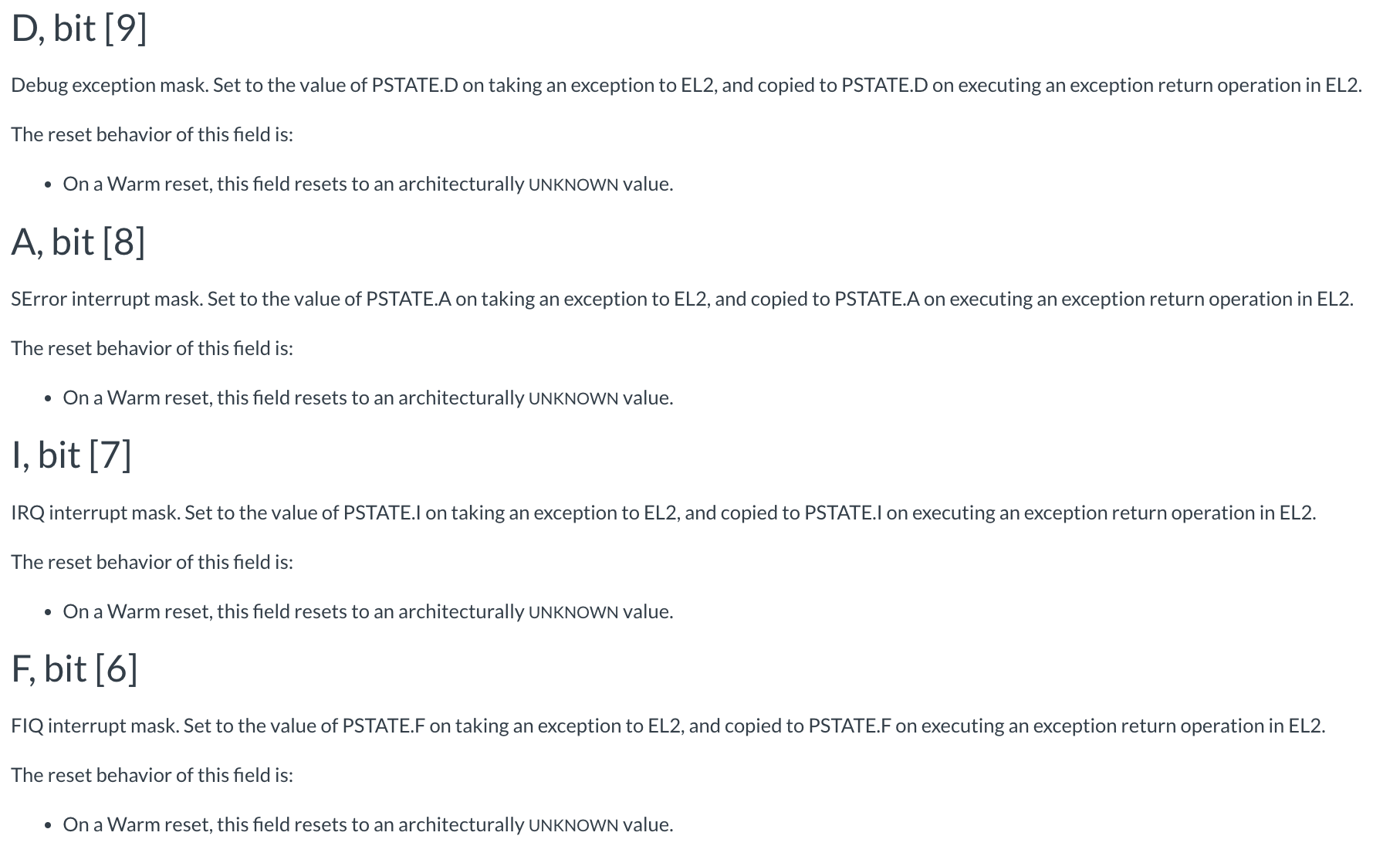
我们在做加减乘除的指令的时候从PSTATE寄存器的高4位读取NZCV的值,来确定状态。今天要涉及的是PSTATEDAIF的值,这部分是异常处理标志位。根据手册的翻译,如果异常发生,PSTATE信息会被存入到Saved program status register(SPSR_ELn),只有3个,SPSR_EL1, SPSR_EL2, SPSR_EL3。
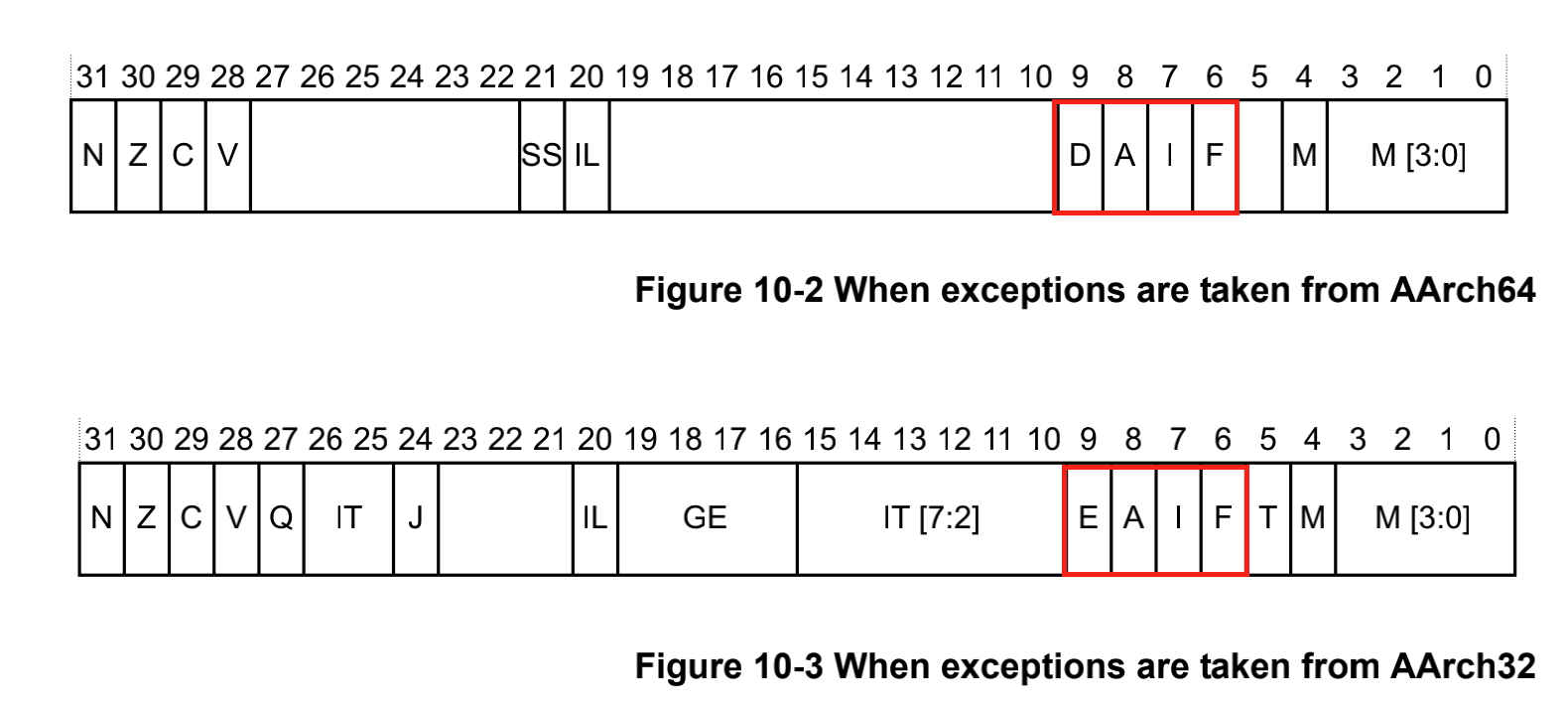
DAIF就是exception bit mask bits,还有SPSel
- D: debug exceptions mask
- A: SError interrupt process state mask,例如异步external abort
- I:IRQ中断就处理状态掩码
- F:FIQ中断处理状态掩码
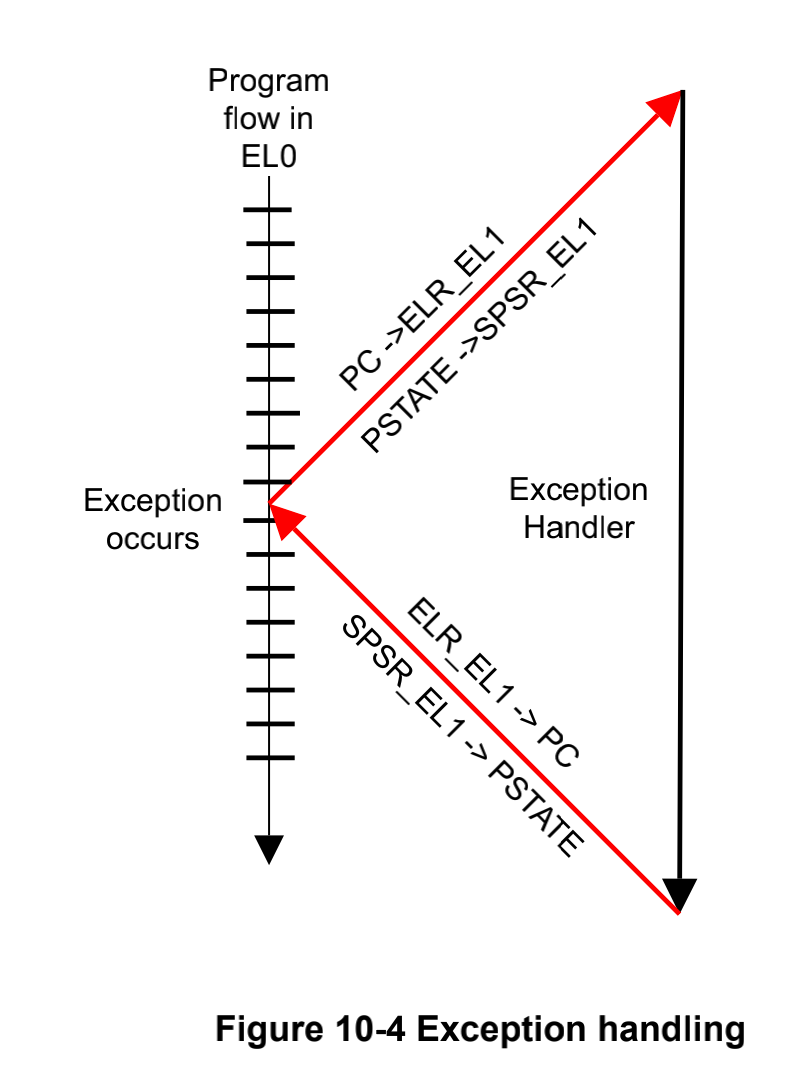
当异常发生的时候,PSTATE寄存器的值(current EL, DAIF, NZCV etc)都会被复制到SPSR_ELn,返回的地址会被也会被存储到ELR_ELn中。
有几点需要注意:
-
SPSR_EL1,2,3是三个不同的寄存器实体
-
在同步或者SError异常,ESR_ELn也会被更新,用于表明产生异常的原因。
-
我们已经看见SPSR已经为异常的返回记录了必要的状态信息,还要知道link registers用于存储程序地址信息。ARM64提供一个独立的链接寄存器用于函数调用和异常返回。
-
我们在做汇编跳转的实验的时候需要备份X30寄存器的地址,在异常返回的时候它的值也是会被指令地址更新。X30子函数的返回地址,ret指令返回;ELR_ELx存储异常返回地址,使用ERET指令**。
-
ELR_ELn用于存储从一个异常返回到程序的地址。对于一些异常,这个地址是产生异常的下一条指令地址,但有些情况,例如SVC指令的执行,因为发生了异常,我们需要回来的时候继续执行原指令而不是下一条指令,这个就有说法了。异步异常,ELR_ELn指向一个还没有被执行的第一条指令的地址,这个时候我们在handler的代码里面是可以修改ELR_ELn指向的地址的,比如发生了abort指令的异常,异常结束之后我们还需要回到发生异常的那条指令上去。所以就必须要对地址进行减4或者减8。
-
SPSR和ELR寄存器,每一个异常等级都有自己的栈寄存器SP_ELn。这些寄存器用于指示不同EL层级专用的栈。如果没有专用的栈指针,当函数执行到异常处理的handler的时候,SP指针就会被异常处理函数覆盖,所以每一级的SP_EL都会存储自己的原始的地址。
-
handler可能会把SP_ELn切换到SP_EL0。比如,SP_EL1可能指向一块由内核进行安全维护的比较小的内存区域,SP_EL0指向一块内核没有负责安全维护的比较大的内核任务栈空间(有可能发生溢出),这个时候可能EL1溢出到EL0。这个时候需要写[SPSel]位,来进行SP_EL的切换:
msr SPSel, #0 // switch to SP_EL0 msr SPSel, #1 // switch to SP_EL1
4. Syn and Asyn exceptions
异步和同步异常在ARM64处理器里面处理的方式不太一样,而且使用的寄存器还有寄存器的行为都是不一样的。这一小节笔记主要就是来分析和记录一下同步异步处理的不同点,后面还有关于aarch32和aarch64混合的时候,arm64的一些行为。ARM的手册在最开始的时候就强调一个事情,return address是否包含具体的发生异常的原因。这个有什么用不太清楚,手册里面注明,对于同步的异常,回退地址总能包含发生异常的原因,然而对于异步的异常,回退地址可能会包含发生异常的原因。
异步的异常主要有三种:
- IRQ中断
- FIQ快速中断
- SError系统错误,(最可能是异步数据错误Data Abort,从cache回写脏数据到外存)
同步的异常包含:
- MMU的指令错误(执行标记为不可执行的内存)
- MMU的数据错误(读取权限问题,对齐问题)
- SP/PC对齐检查错误
- 同步外部错误,读translation table
- 无法识别的指令
- 调试异常。
4.1 sync aborts
同步异常的触发有很多种情况,这里需要注意的是,异常不代表错误,异常状态也可能是系统正常处理的一部分,比如,在Linux里面内存缺页错误,还有我们之前说预计加载指令的page fault10,这都是为了提升性能必须要制造的异常场景。同步的异常处理包含:
- Abort form the MMU
- SP PC alignment checking
- Unallocated instructions
- opcode缺失
- 权限不匹配
- 执行被禁止的指令
- PSTATE.IL被置位的时候
- Service Calls(SVCs, SMCs, HVCs)
在ARMv7架构里面,预取指令prefetch,数据错误Data abort,未定义异常undef是分开的指令。而在AARCH64架构里面,都视为同步异常,如果我们想在AARCH64体系架构里面知道具体的异常是什么东西,那就需要配合其他寄存器来获取更全面的信息,ESR_ELn,FAR_ELn。
4.2 Handling synchronous exceptions
- Exception Syndrome Register (ESR_ELn):异常的具体原因。
- Fault Address Register (FAR_ELn):提供发生同步指令错误、数据错误和对齐错误的虚拟地址。
- Exception Link register (ELR_ELn):数据访问发生错误的指令的地址,这个寄存器通常在内存错误之后被写入,还有一种情况也会写入这个地址,就是访问非对齐的地址。
有个AARCH32和AARCH64混合的场景,我们在运行32位程序的时候需要进入到EL1执行,这个时候32位的程序发生了异常,需要进入到EL2处理,此时EL2还是AARCH64的,这个时候我们想要获取到32位程序的异常,需要进入到EL2的FAR寄存器读取信息,EL1的AARCH32的执行状态的FAR,全部清0。
对于比较高等级的EL2(hypervisor),EL3(secure monitor):
- 同步异常发生在自己的等级(EL2, EL3)或者是更高的等级(EL2)
- 异步异常能够被路由到更高的等级(EL2, EL3)是被hypervisor或者secure monitor来处理的。可以通过SCR_EL3指定到EL3的路由信息,HCR_EL2来指定到EL2的路由信息。
- 当然这些寄存器配置也包含IRQ,FIQ,Serror的路由。
4.3 system calls
EL0 call EL1
执行应用程序想要使用特权指令这个时候就需要系统调用。其中的一种方法就是SVC指令。当应用程序call这个SVC的时候,就会产生异常,处理器理所应当的进入到了更高一级的EL。这个时候如果我们想传递一些参数,就通过写寄存器的方式。
EL1 call EL2/3
如果在EL0,是不允许直接call到EL2或者EL3的,必须通过EL0 call到EL1的os kernel,由kernel发送请求到EL2/3。在EL1的os kernel通过HVC指令call到hypervisor,或者os kernel通过SMC指令call到secure monitor的。如果在处理器里面没有EL3,这个时候就会出现新的异常unallocted instruction。注意,我看手册里面是EL1可以call HVC也可以直接call SMC。
EL2 call EL3
EL2可以call EL3通过SMC指令。如果在EL2/3 向后call HVC指令,也会有个同步异常发生在本异常等级。
4.4 Exe state & Exception level
官方手册里面给了一个图表示EL0 如何 call进入EL1的,可以说这个是一个直接关系,EL0是没有任何异常处理机制的。
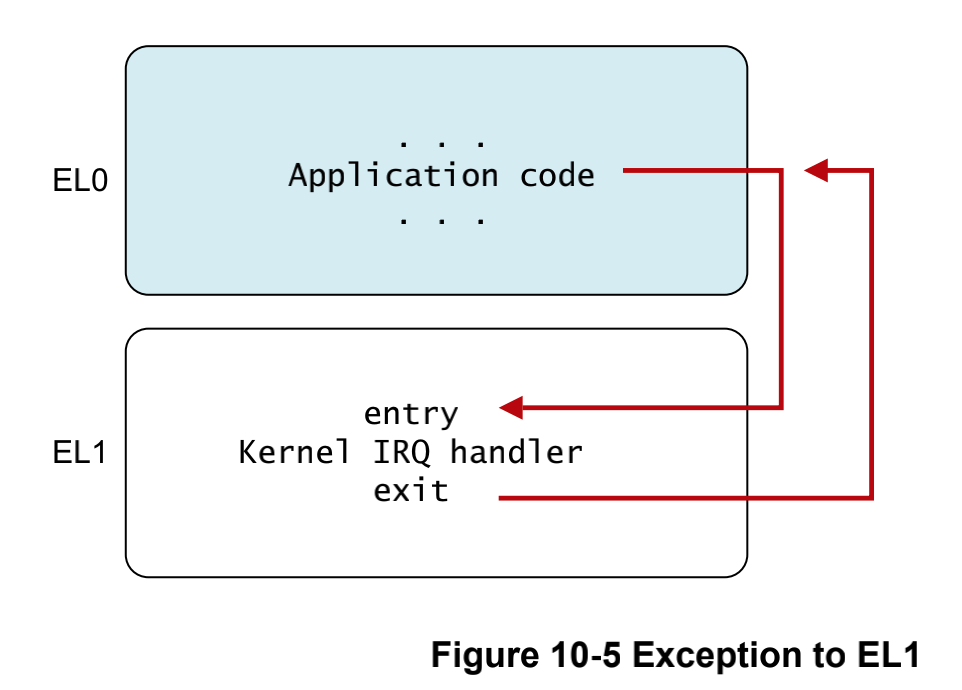
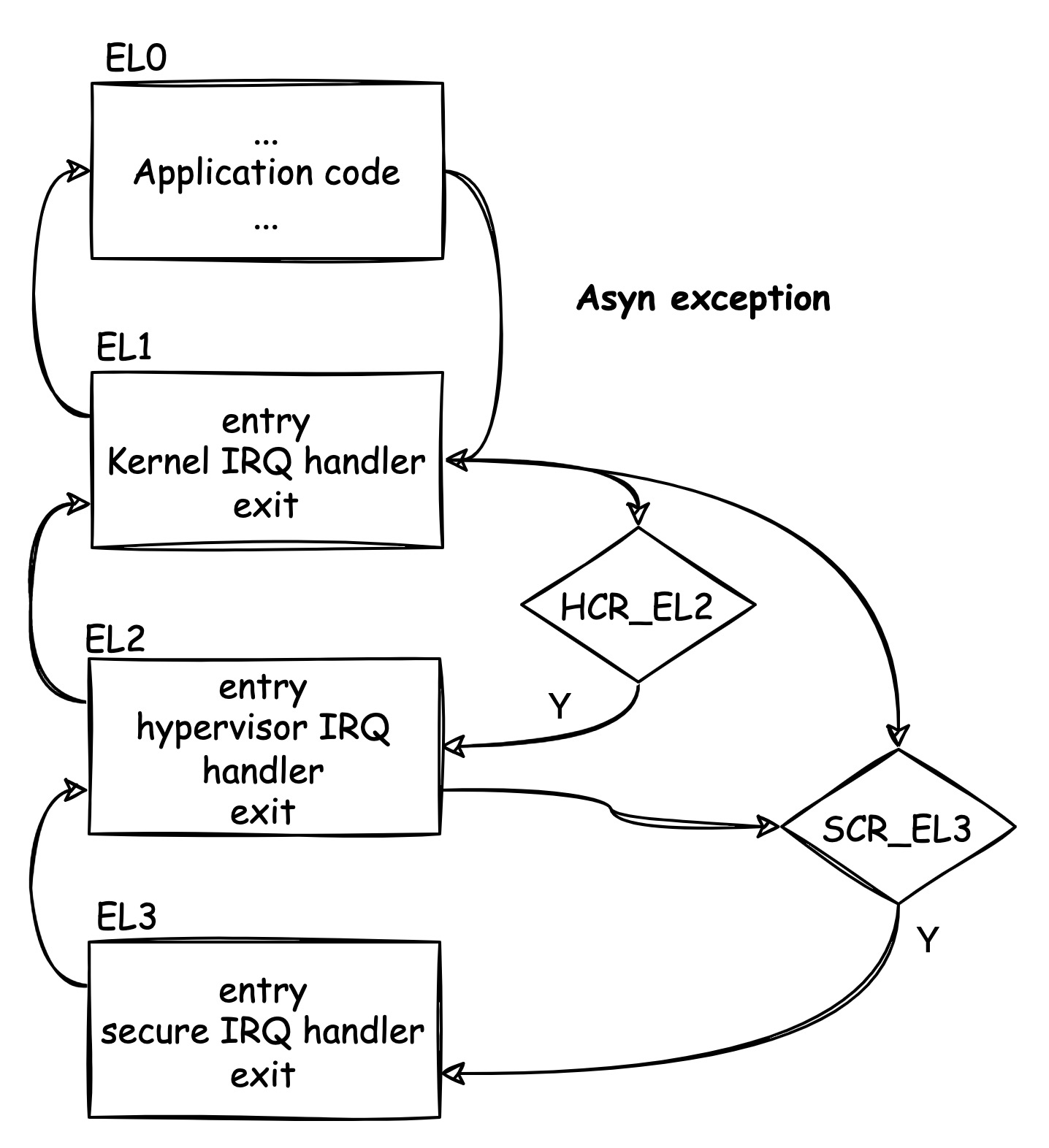
我们补充一下关于EL1 call进EL2/3的图,对于同步的异常而言,没什么好说的了,就是一级一级的call进去,但是对于异步的异常而言,就有点不一样了,我们EL1需要call EL2或者EL3的时候,需要配置HCR寄存器决定路由信息,同样的EL3也是需要路由信息的配置的。否则会产生新的异常。
还有一个比较特殊的情况,当有一个从AARCH32发生的异常到AARCH64处理,必须做一些特殊的考虑,AARCH64需要访问32位的寄存器了,直接访问肯定会hang死,所以ARM处理做了一些映射处理:
- R0-R12 : X0-X12
- SP LR: X13 - X23
- R8-R12:X24 - X29
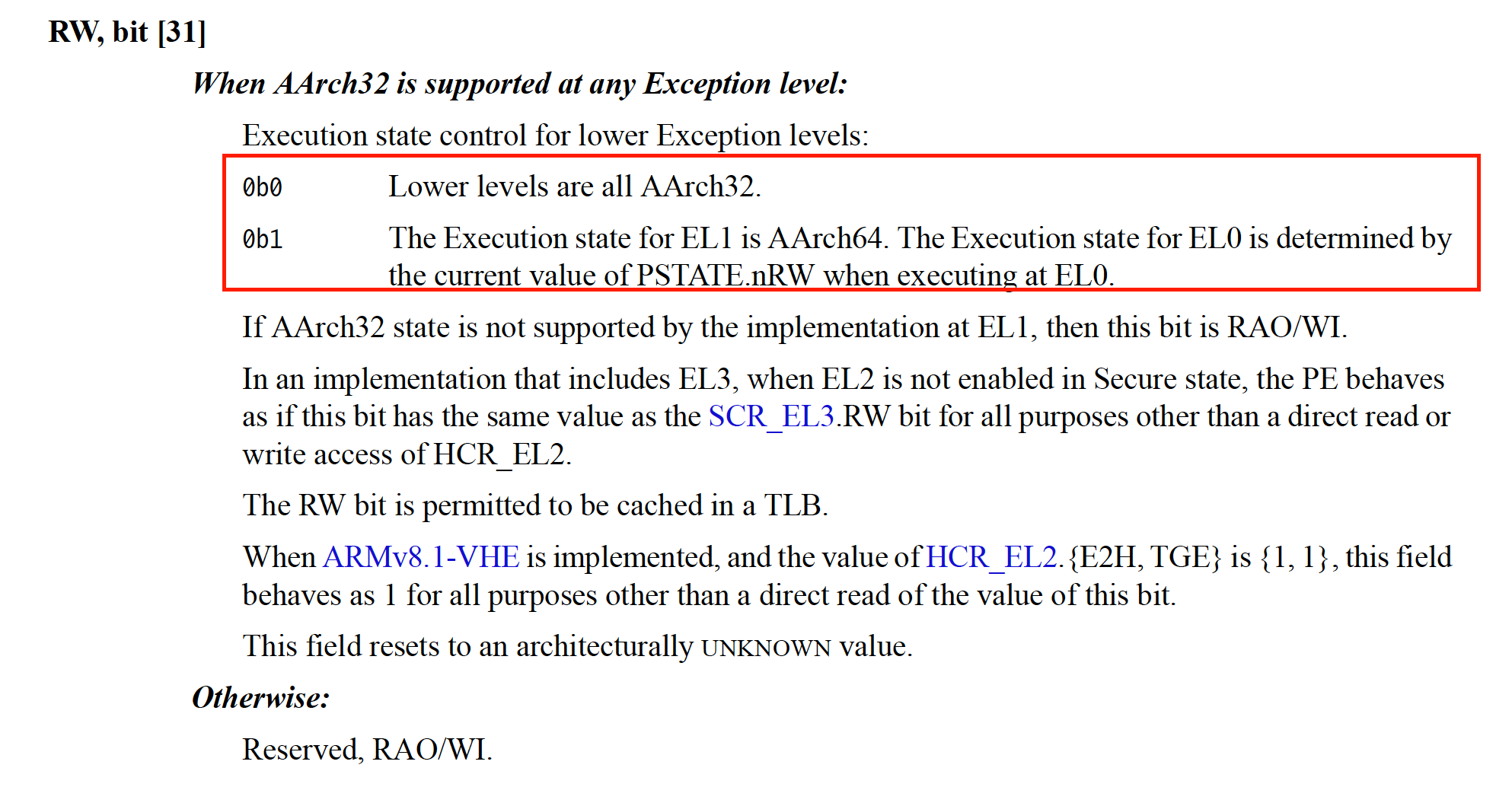
HCR_EL2.RW记录了EL1运行在哪个模式, 1代表aarch64, 0是aarch3211
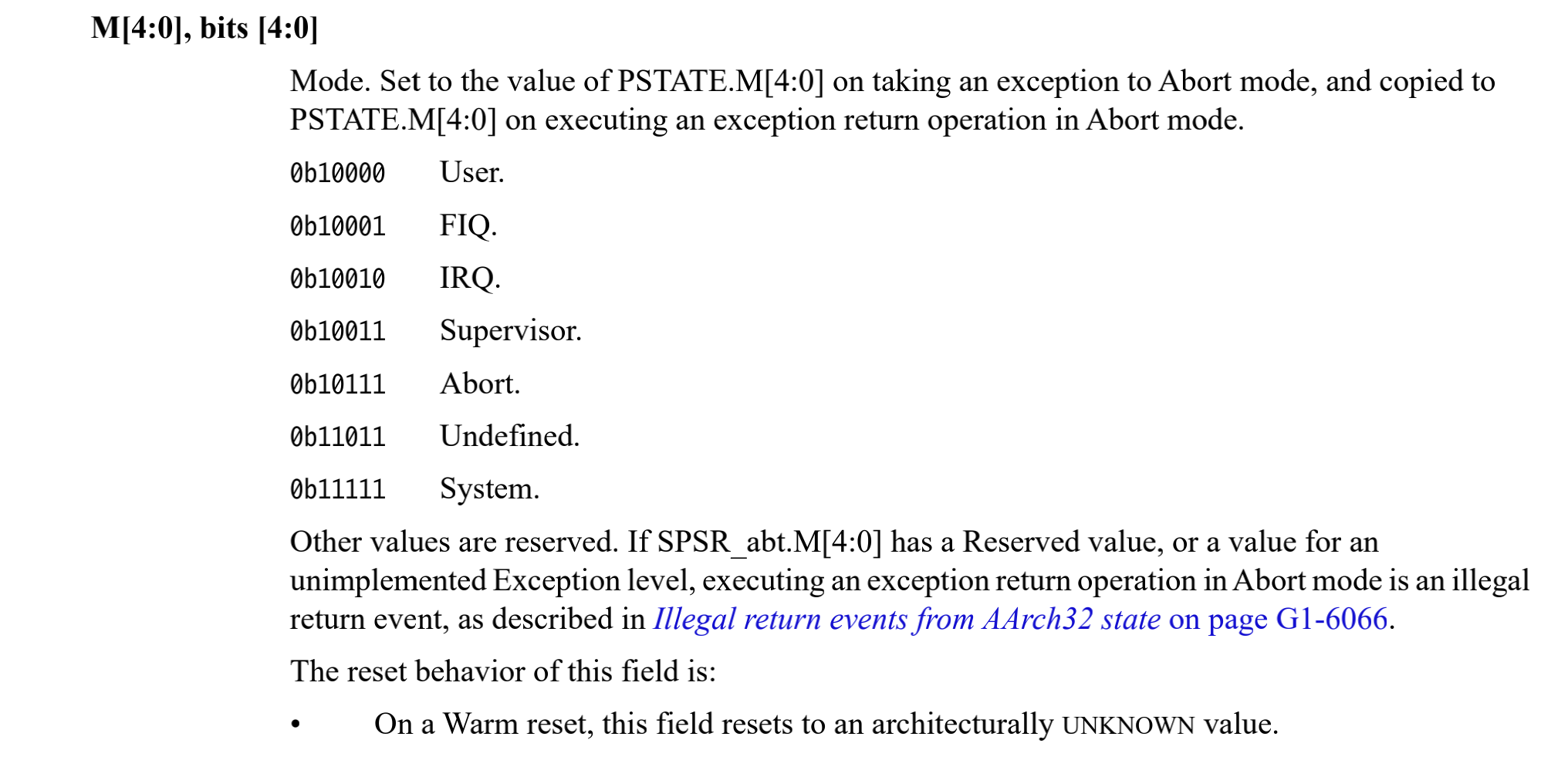
关于返回的时候,也是通过寄存器找返回地址和返回的模式,在SPSR寄存器M[4:0]记录了返回的模式。
4.5 Exception Table
4.5.1 Table
采用基地址+offset的模式,ARMv8有三个表,VBAR_EL1, VBAR_EL2, VBAR_EL3。 高11位有效。
| Address | Exception type | Description |
|---|---|---|
VBAR_ELn + 0x000 |
Synchronous | Current EL with SP0 |
+ 0x080 |
IRQ/vIRQ | Current EL with SP0 |
+ 0x100 |
FIQ/vFIQ | Current EL with SP0 |
+ 0x180 |
SError/vSError | Current EL with SP0 |
+ 0x200 |
Synchronous | Current EL with SPx |
+ 0x280 |
IRQ/vIRQ | Current EL with SPx |
+ 0x300 |
FIQ/vFIQ | Current EL with SPx |
+ 0x380 |
SError/vSError | Current EL with SPx |
+ 0x400 |
Synchronous | Lower EL using AArch64 |
+ 0x480 |
IRQ/vIRQ | Lower EL using AArch64 |
+ 0x500 |
FIQ/vFIQ | Lower EL using AArch64 |
+ 0x580 |
SError/vSError | Lower EL using AArch64 |
+ 0x600 |
Synchronous | Lower EL using AArch32 |
+ 0x680 |
IRQ/vIRQ | Lower EL using AArch32 |
+ 0x700 |
FIQ/vFIQ | Lower EL using AArch32 |
+ 0x780 |
SError/vSError | Lower EL using AArch32 |
如果kernel code执行在EL1,IRQ一个中断过来,这时候SP_EL1,而且SPSel bit被置位,执行地址就应该是 VBAR_EL1 + 0x280。
4.5.2 Linux Kernel
以下是linux 4.14内核的entry.S文件中书写的异常向量表。
/*
* Exception vectors.
*/
.align 11
ENTRY(vectors)
ventry el1_sync_invalid // Synchronous EL1t
ventry el1_irq_invalid // IRQ EL1t
ventry el1_fiq_invalid // FIQ EL1t
ventry el1_error_invalid // Error EL1t
ventry el1_sync // Synchronous EL1h
ventry el1_irq // IRQ EL1h
ventry el1_fiq_invalid // FIQ EL1h
ventry el1_error_invalid // Error EL1h
ventry el0_sync // Synchronous 64-bit EL0
ventry el0_irq // IRQ 64-bit EL0
ventry el0_fiq_invalid // FIQ 64-bit EL0
ventry el0_error_invalid // Error 64-bit EL0
#ifdef CONFIG_COMPAT
ventry el0_sync_compat // Synchronous 32-bit EL0
ventry el0_irq_compat // IRQ 32-bit EL0
ventry el0_fiq_invalid_compat // FIQ 32-bit EL0
ventry el0_error_invalid_compat // Error 32-bit EL0
#else
ventry el0_sync_invalid // Synchronous 32-bit EL0
ventry el0_irq_invalid // IRQ 32-bit EL0
ventry el0_fiq_invalid // FIQ 32-bit EL0
ventry el0_error_invalid // Error 32-bit EL0
#endif
END(vectors)看一下Linux内核发生异常的时候如何调用函数的,这里以el1_fiq_invalid为例,这个异常没有被Linux kernel实现。
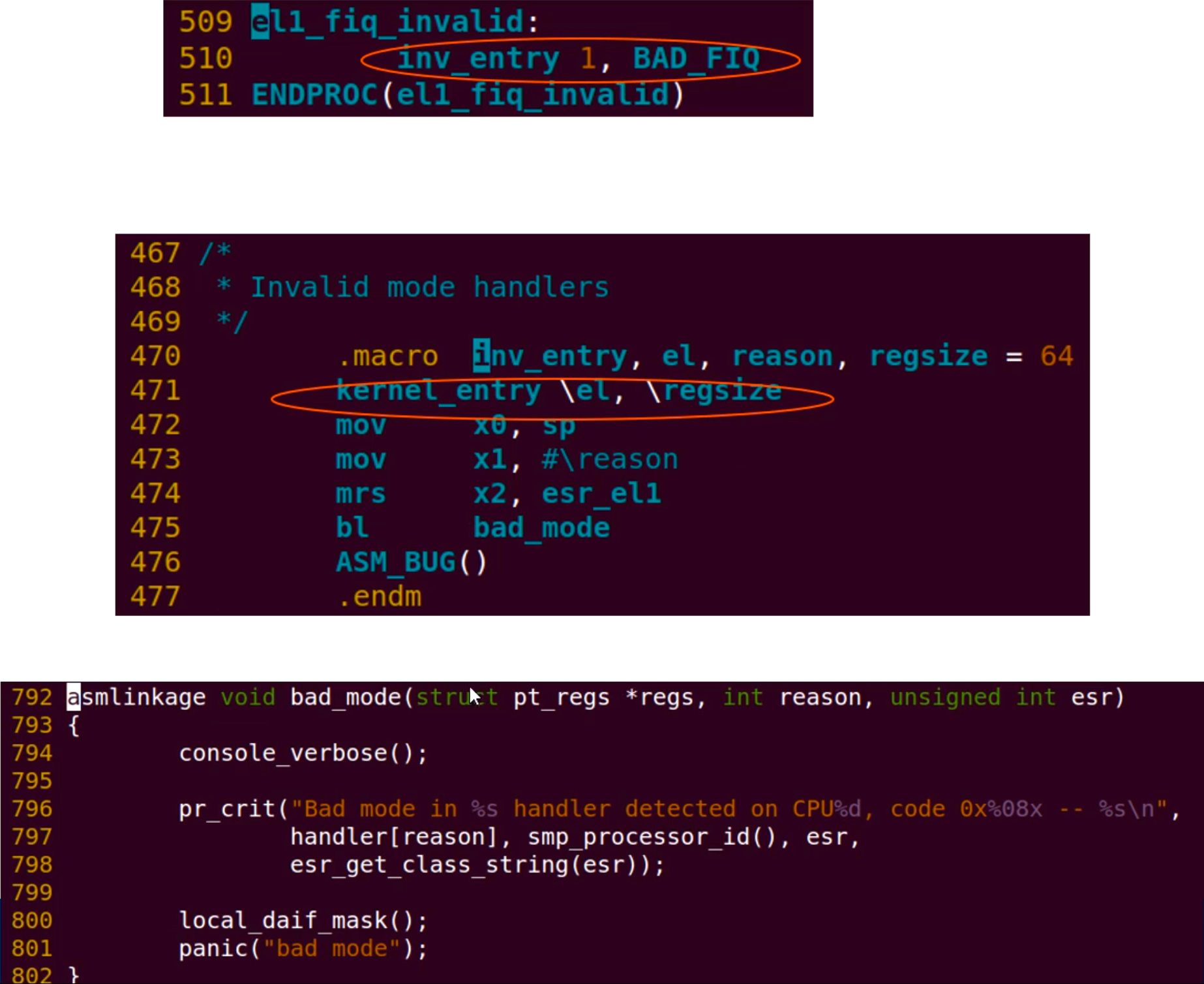
异常向量表 inv_entry 1 , BAD_FIQ,指定el为1,备份sp到x0,把esr_el1(存储具体异常原因的)被分到x2接着跳转到bad_mode里面。
4.5.3 save context
Linux内核的arch/arm64/include/uapi/asm/ptrace.h 和arch/arm64/include/asm/ptrace.h 里面定义了一下结构体,用于存储异常上下文。
struct user_pt_regs {
__u64 regs[31];
__u64 sp;
__u64 pc;
__u64 pstate;
};
struct pt_regs {
union {
struct user_pt_regs user_regs;
struct {
u64 regs[31];
u64 sp;
u64 pc;
u64 pstate;
};
};
u64 orig_x0;
u64 syscallno;
};5. Excepiton Entry
5.1 Entry
上面罗列了很多异常元素的概念,现在需要有机的将上面的内容串起来,看一下ARMv8到底如何处理的异常。CPU需要做的事情:
- S1: PSTATE保存到SPSR_ELx
- S2: 返回地址保存到ELR_ELx
- S3: PSTATE寄存器里面的DAIF域都设定为1(等同于关闭调试异常、SError,IRQ FIQ中断)
- S4: 更新ESR_ELx寄存器(包含了同步异常发生的原因)
- S5: SP执行SP_ELx
- S6: 切换到对应的EL,接着跳转到异常向量表执行
操作系统需要做的事情:
- 识别异常发生的类型
- 跳转到合适的异常向量表(包含异常跳转函数)
- 处理异常
- 操作系统执行eret指令
在操作系统执行ERET指令,CPU需要从ELR_ELx寄存器中恢复PC的指针;从SPSR_ELx寄存器恢复处理器状态。
5. Examples
5.1 switch EL2 to EL1
基于树莓派和QEMU,上电跳转的时候benos处于EL2下,请把benos切换到EL1中运行。
【提示】:
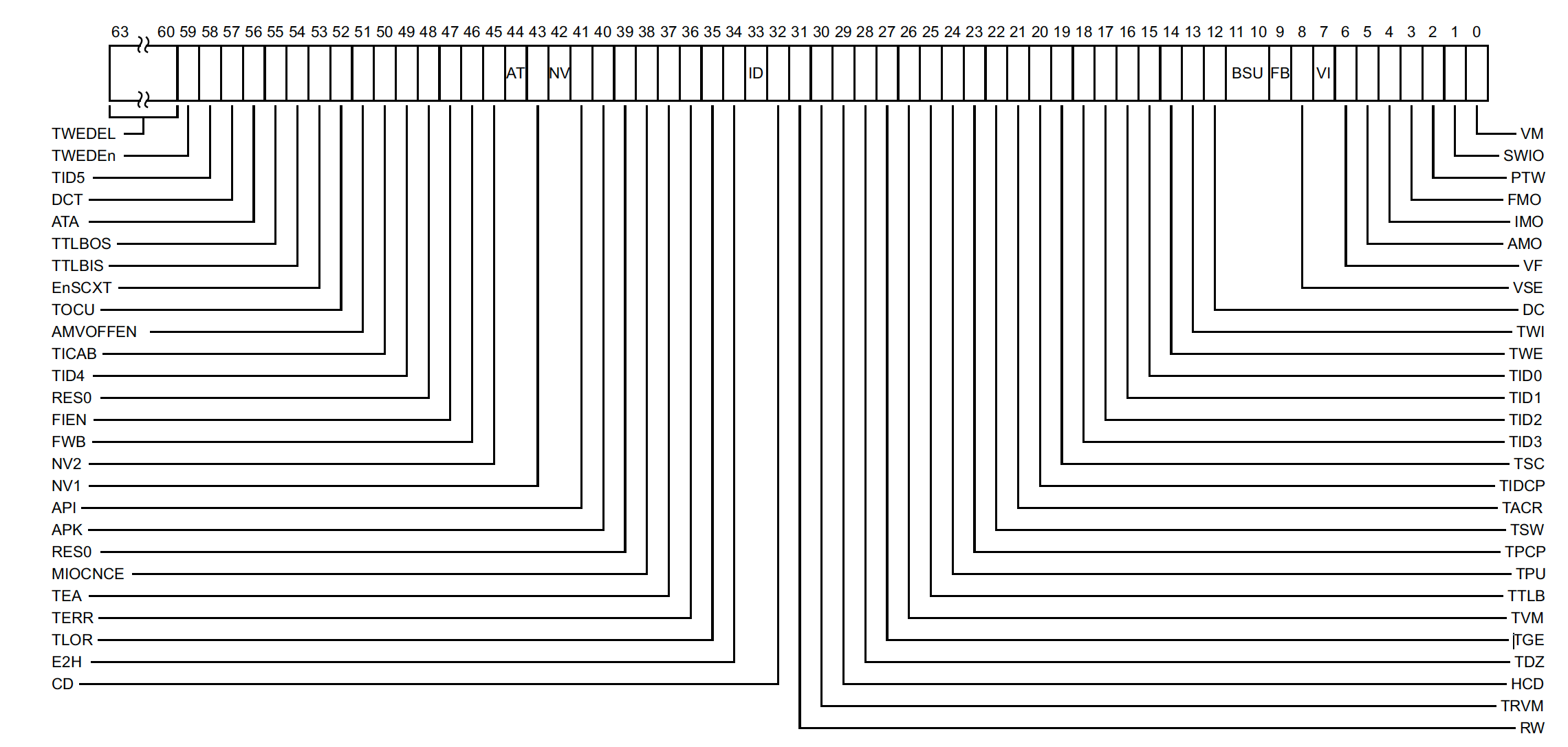
- 设定HCR_EL2寄存器,最重要的是Bit 31的RW域,表示EL1要在哪里执行
- 设定SCTLR_EL1寄存器,需要设定大小端和关闭MMU
- 设定SPSR_EL2寄存器,设定模式M域为EL1h,另外关闭所有的DAIF
- 设定异常返回寄存器ELR_EL2,让其返回el1_entry汇编的函数里面。
- 执行ERET
【程序流】:
flowchart TB
A[start] --> B{1, EL n?} -- EL1 --> C[ERET]
B -- EL2 --> D[Start switching EL1]
D -- bitRW --> E[2,set HCR_EL2 reg]
E -- close MMU --> F[3,set SCTLR_EL1 reg]
F -- close DAIF --> G[4,SPSR_EL2 reg]
G --> H[5,set ELR_EL2 reg]
H --> J[6,ERET]
Node 1: judge ELn
要判断当前的是EL几,可以通过访问CurrentEL12系统寄存器来确定,这个是个64位的寄存器。
EL,bit[3:2]
| EL | Meaning |
|---|---|
| 0b00 | EL0. |
| 0b01 | EL1. |
| 0b10 | EL2. |
| 0b11 | EL3. |
#define BITS_EL0 (0)
#defien BITS_EL1 (0x1 << 2)
#define BITS_EL2 (0x1 << 3)
#define BITS_EL3 (0x3 << 2)
MRS <Xt>, CurrentEL
msr x5, CurrentELs
cmp x5, #BITS_EL2
b.eq el3_entry
b el2_entryNode 2: set HCR_EL2 reg (about AArch64)
这个HCR_EL211主要用于设定我们的目标异常等级。
主要是配置这个:
#define HCR_EL2_REG_SET_AARCH64 (1 << 31)
ldr x0, =HCR_EL2_REG_SET_AARCH64
msr hcr_els, x0Node 3: MMU closing
SCTLR_EL113EL1的系统控制寄存器上面可以关掉MMU。
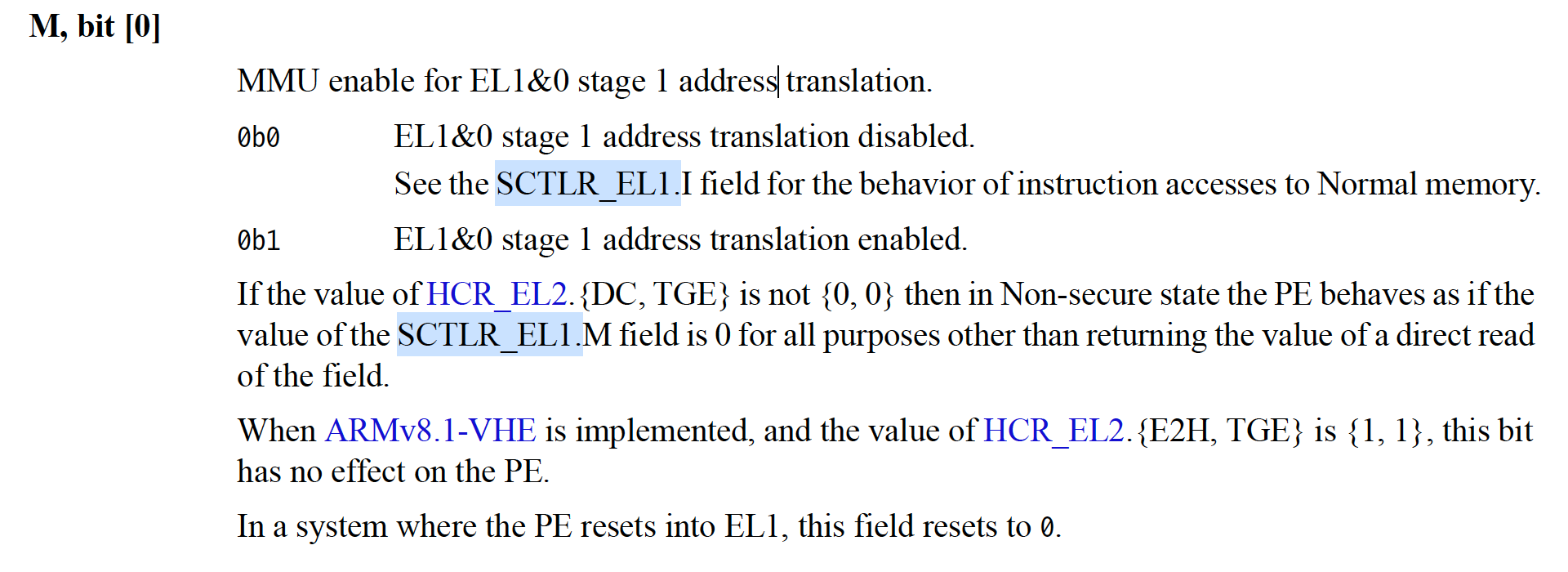
#define SCTLR_EL1_REG_CLEAR_MMU (0)
ldr x0, =SCTLR_EL1_REG_CLEAR_MMU
msr sctrl_el1, x0Node 4: Clear DAIF
SPSR_EL2寄存器14
#define SPSR_MASK_ALL (0x7 << 6)
#define SPSR_EL1h (5 << 0)
#define SPSR_EL2h (9 <<0)
#define SPSR_EL1 (SPSR_MASK_ALL | SPSR_EL1h)
#define SPSR_EL2 (SPSR_MASK_ALL | SPSR_EL2h)
ldr x0, =SPSR_EL1
msr spsr_el2, x0Node 5: Set entry
ELR_EL215设定异常返回地址。
When HCR_EL2.E2H is 1, without explicit synchronization, access from EL2 using the mnemonic ELR_EL2 or ELR_EL1 are not guaranteed to be ordered with respect to accesses using the other mnemonic.
Accesses to this register use the following encodings in the System register encoding space:
MRS <Xt>, ELR_EL2
MSR ELR_EL2, <Xt>
adr x0, el1_entry
msr elr_el2, x0
el1_entry:
bl print_el5.2 register exception vectors
// entry.S
/*
| `VBAR_ELn + 0x000` | Synchronous | Current EL with SP0 |
| `+ 0x080` | IRQ/vIRQ | Current EL with SP0 |
| `+ 0x100` | FIQ/vFIQ | Current EL with SP0 |
| `+ 0x180` | SError/vSError | Current EL with SP0 |
*/
#define BAD_SYNC 0
#define BAD_IRQ 1
#define BAD_FIQ 2
#define BAD_ERROR 3
.global user_str0
// .align 3
// user_str0:
// .string "entry.S: join inv_entry \n"
/*
* inv_entry el, reason
*/
.macro inv_entry el, reason
//adrp x0, user_str0
//add x0, x0, :lo12:user_str0
//bl put_string_uart
mov x0, SP
mov x1, #\reason
mrs x2, ESR_EL1
b bad_mode
.endm
/*
* vector_table entry label
*/
.macro vtentry label
.align 7
b \label
.endm
/*
| ------------------ | -------------- | ---------------------- |
| `VBAR_ELn + 0x000` | Synchronous | Current EL with SP0 |
| `+ 0x080` | IRQ/vIRQ | Current EL with SP0 |
| `+ 0x100` | FIQ/vFIQ | Current EL with SP0 |
| `+ 0x180` | SError/vSError | Current EL with SP0 |
| ------------------ | -------------- | ---------------------- |
| `+ 0x200` | Synchronous | Current EL with SPx |
| `+ 0x280` | IRQ/vIRQ | Current EL with SPx |
| `+ 0x300` | FIQ/vFIQ | Current EL with SPx |
| `+ 0x380` | SError/vSError | Current EL with SPx |
| ------------------ | -------------- | ---------------------- |
| `+ 0x400` | Synchronous | Lower EL using AArch64 |
| `+ 0x480` | IRQ/vIRQ | Lower EL using AArch64 |
| `+ 0x500` | FIQ/vFIQ | Lower EL using AArch64 |
| `+ 0x580` | SError/vSError | Lower EL using AArch64 |
| ------------------ | -------------- | ---------------------- |
| `+ 0x600` | Synchronous | Lower EL using AArch32 |
| `+ 0x680` | IRQ/vIRQ | Lower EL using AArch32 |
| `+ 0x700` | FIQ/vFIQ | Lower EL using AArch32 |
| `+ 0x780` | SError/vSError | Lower EL using AArch32 |
| ------------------ | -------------- | ---------------------- |
*/
.align 11
.global vectors
vectors:
/*
| Current EL with SP0
| ------------------ | -------------- | ---------------------- |
| `VBAR_ELn + 0x000` | Synchronous | Current EL with SP0 |
| `+ 0x080` | IRQ/vIRQ | Current EL with SP0 |
| `+ 0x100` | FIQ/vFIQ | Current EL with SP0 |
| `+ 0x180` | SError/vSError | Current EL with SP0 |
| ------------------ | -------------- | ---------------------- |
*/
vtentry el1_sync_invalid
vtentry el1_irq_invalid
vtentry el1_fiq_invalid
vtentry el1_error_invalid
/*
| Current EL with SPx
| ------------------ | -------------- | ---------------------- |
| `+ 0x200` | Synchronous | Current EL with SPx |
| `+ 0x280` | IRQ/vIRQ | Current EL with SPx |
| `+ 0x300` | FIQ/vFIQ | Current EL with SPx |
| `+ 0x380` | SError/vSError | Current EL with SPx |
| ------------------ | -------------- | ---------------------- |
*/
vtentry el1_sync_invalid
vtentry el1_irq_invalid
vtentry el1_fiq_invalid
vtentry el1_error_invalid
/*
| Lower EL using AArch64
| ------------------ | -------------- | ---------------------- |
| `+ 0x400` | Synchronous | Lower EL using AArch64 |
| `+ 0x480` | IRQ/vIRQ | Lower EL using AArch64 |
| `+ 0x500` | FIQ/vFIQ | Lower EL using AArch64 |
| `+ 0x580` | SError/vSError | Lower EL using AArch64 |
| ------------------ | -------------- | ---------------------- |
*/
vtentry el0_sync_invalid
vtentry el0_irq_invalid
vtentry el0_fiq_invalid
vtentry el0_error_invalid
/*
| Lower EL using AArch32
| ------------------ | -------------- | ---------------------- |
| `+ 0x600` | Synchronous | Lower EL using AArch32 |
| `+ 0x680` | IRQ/vIRQ | Lower EL using AArch32 |
| `+ 0x700` | FIQ/vFIQ | Lower EL using AArch32 |
| `+ 0x780` | SError/vSError | Lower EL using AArch32 |
| ------------------ | -------------- | ---------------------- |
*/
vtentry el0_sync_invalid
vtentry el0_irq_invalid
vtentry el0_fiq_invalid
vtentry el0_error_invalid
el1_sync_invalid:
inv_entry 1, BAD_SYNC
el1_irq_invalid:
inv_entry 1, BAD_IRQ
el1_fiq_invalid:
inv_entry 1, BAD_FIQ
el1_error_invalid:
inv_entry 1, BAD_ERROR
el0_sync_invalid:
inv_entry 0, BAD_SYNC
el0_irq_invalid:
inv_entry 0, BAD_IRQ
el0_fiq_invalid:
inv_entry 0, BAD_FIQ
el0_error_invalid:
inv_entry 0, BAD_ERROR
/* make 2 byte bias */
string_test:
.string "t001"
.global assert_alignment
assert_alignment:
ldr x0, =0x80002
ldr x1, [x0]
ret需要在boot.S中注册向量表
ldr x5, =vectors
msr VBAR_EL1, x5
isbkernel最后跳转:
#include "uart.h"
#define __u64 unsigned long
#define u64 __u64
extern void assert_alignment();
struct user_pt_regs {
__u64 regs[31];
__u64 sp;
__u64 pc;
__u64 pstate;
};
struct pt_regs {
union {
struct user_pt_regs user_regs;
struct {
u64 regs[31];
u64 sp;
u64 pc;
u64 pstate;
};
};
u64 orig_x0;
u64 syscallno;
};
#define read_sysreg(reg) ({ \
unsigned long _val; \
asm volatile("mrs %0," #reg \
: "=r"(_val)); \
_val; \
})
#define write_sysreg(val, reg) ({ \
unsigned long _val = (unsigned long)val; \
asm volatile("msr " #reg ", %x0" \
:: "rZ"(_val)); \
})
static const char * const bad_mode_handler[] = {
"Sync Abort",
"IRQ",
"FIQ",
"SError"
};
void bad_mode(struct pt_regs *regs, int reason, unsigned int esr)
{
uart_send_string("failed\n");
#if 0
printk("Bad mode for %s handler detected, far:0x%x esr:0x%x\n",
bad_mode_handler[reason], read_sysreg(far_el1),
esr);
#endif
}
// load_image /Users/carlos/workspace/work/armv8-train/lab12/benos.bin 0x80000
void kernel_main(void)
{
uart_init();
//init_printk_done();
//printk("printk: printk is ready\n");
uart_send_string("uart: hello kernel main\n");
assert_alignment();
uart_send_string("uart: end kernel main.\n");
while (1) {
uart_send(uart_recv());
}
}Reference and Change Log
[1]: 2022-8-13: 增加 2.3章节,解说中断嵌套机制
Footnotes
-
ARM Cortex-A Series Programmer's Guide for ARMv8-A - Fundamentals of ARMv8 ↩
-
ARM Cortex-A Series Programmer's Guide for ARMv7-A - ARM Processor Modes and Registers ↩
-
ARM Cortex-A Series Programmer's Guide for ARMv8-A - AArch64 Exception Handling ↩
-
Arm Cortex‑A78AE Core Technical Reference Manual - HCR_EL2, Hypervisor Configuration Register, EL2 ↩ ↩2
-
Arm A-profile Architecture Registers - CurrentEL, Current Exception Level ↩
-
Arm Armv8-A Architecture Registers - SCTLR_EL1, System Control Register (EL1) ↩
-
Arm Armv8-A Architecture Registers - SPSR_EL2, Saved Program Status Register (EL2) ↩
-
Arm A-profile Architecture Registers - ELR_EL2, Exception Link Register (EL2) ↩