Cannot set pidsum through cli
ApolloBian opened this issue · comments

Describe the bug
I have set pidsum_limit & pidsum_limit_yaw both to 1000 through cli:

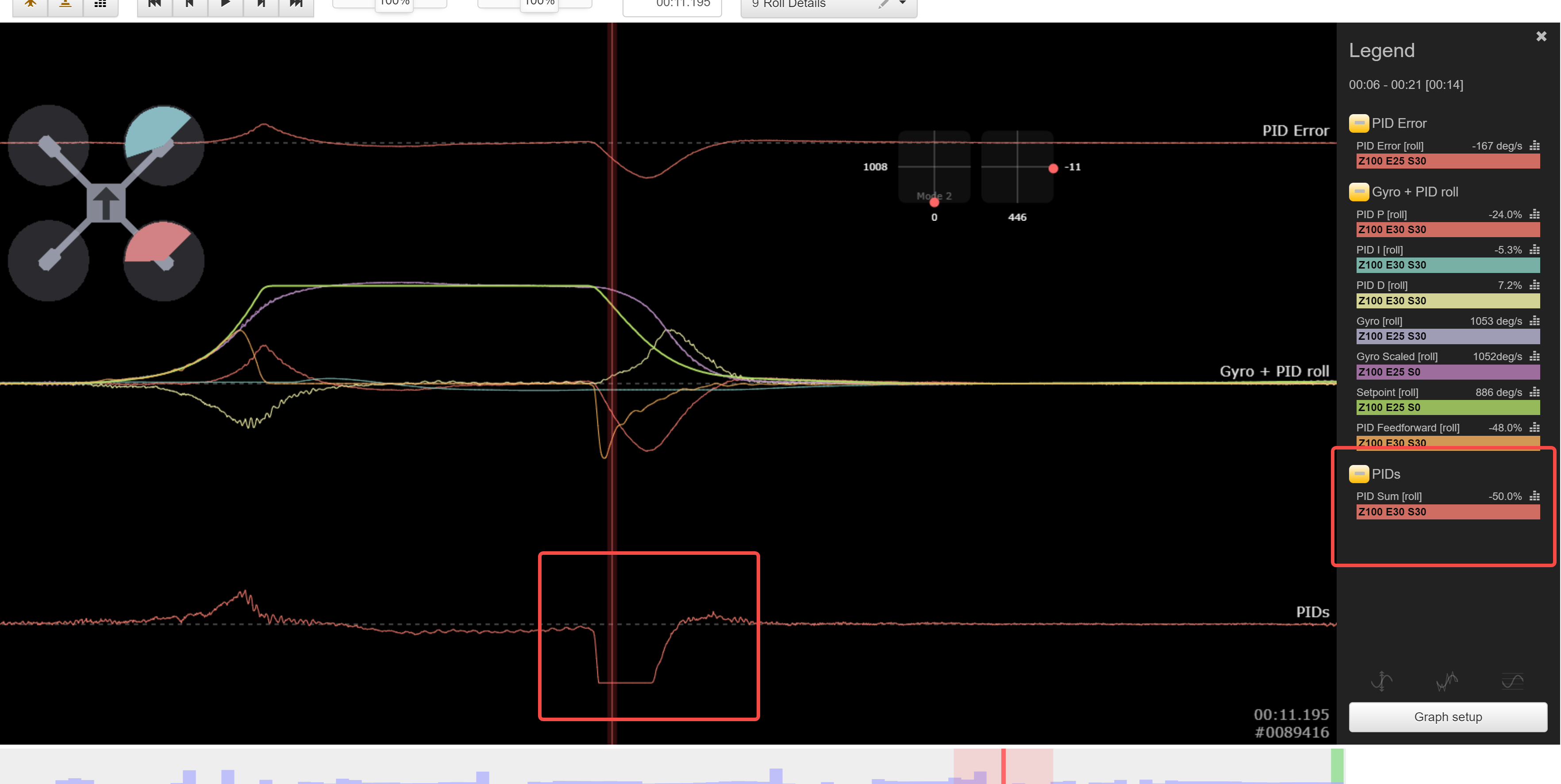
However, in blackbox explorer, the traces show that pidsum is only at 500(50%):
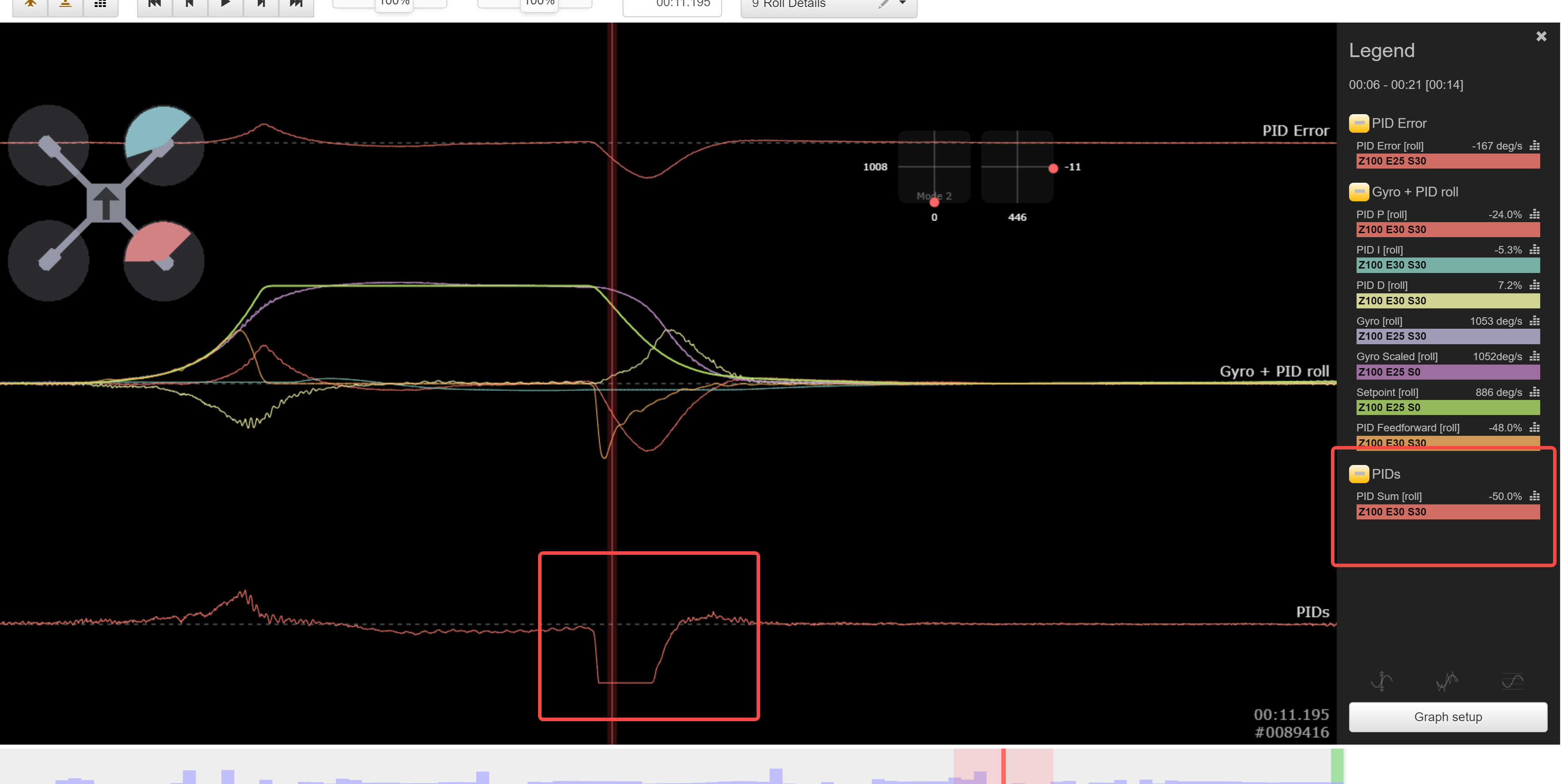
the info panel also shows that pidsum is not set:

To Reproduce
Betaflight configurator windows 10.8.0 (5ec9465)
FC: HGLRCF722(STM32F7X2)
Expected behavior
pidsum_limit should be set to 1000
Configurator version
Betaflight configurator windows 10.8.0 (5ec9465)
Flight controller configuration
diff
# version
# Betaflight / STM32F7X2 (S7X2) 4.3.1 Jul 13 2022 / 03:36:10 (8d4f005) MSP API: 1.44
# config: manufacturer_id: HGLR, board_name: HGLRCF722, version: 907ed680, date: 2022-06-29T01:35:35Z
# start the command batch
batch start
board_name HGLRCF722
manufacturer_id HGLR
# name: TP3
# feature
feature -RX_PARALLEL_PWM
feature -AIRMODE
feature RX_SERIAL
feature OSD
# serial
serial 2 8192 115200 57600 0 115200
# beacon
beacon RX_LOST
beacon RX_SET
# map
map TAER1234
# aux
aux 0 0 0 1700 2100 0 0
aux 1 13 3 1700 2100 0 0
aux 2 35 2 1700 2100 0 0
aux 3 39 1 1400 2100 0 0
# rxrange
rxrange 0 988 2011
rxrange 1 988 2011
rxrange 2 988 2011
rxrange 3 988 2011
# vtxtable
vtxtable bands 5
vtxtable channels 8
vtxtable band 1 BOSCAM_A A CUSTOM 5865 5845 5825 5805 5785 5765 5745 5725
vtxtable band 2 BOSCAM_B B CUSTOM 5733 5752 5771 5790 5809 5828 5847 5866
vtxtable band 3 BOSCAM_E E CUSTOM 5705 5685 5665 5645 5885 5905 5925 5945
vtxtable band 4 FATSHARK F CUSTOM 5740 5760 5780 5800 5820 5840 5860 5880
vtxtable band 5 RACEBAND R CUSTOM 5658 5695 5732 5769 5806 5843 5880 5917
vtxtable powerlevels 3
vtxtable powervalues 25 100 200
vtxtable powerlabels 25 100 200
# master
set gyro_lpf1_static_hz = 0
set gyro_lpf2_static_hz = 0
set dyn_notch_count = 1
set dyn_notch_q = 500
set gyro_lpf1_dyn_min_hz = 0
set gyro_lpf1_dyn_max_hz = 1000
set acc_calibration = 85,-25,-4057,1
set mag_hardware = NONE
set baro_hardware = NONE
set min_check = 1002
set max_check = 1990
set rc_smoothing_auto_factor = 52
set serialrx_provider = CRSF
set min_throttle = 1070
set dshot_idle_value = 400
set dshot_bidir = ON
set use_unsynced_pwm = OFF
set motor_pwm_rate = 480
set motor_poles = 12
set yaw_motors_reversed = ON
set small_angle = 180
set yaw_deadband = 5
set simplified_gyro_filter_multiplier = 200
set osd_warn_core_temp = OFF
set osd_vbat_pos = 2444
set osd_tim_2_pos = 2454
set osd_remaining_time_estimate_pos = 375
set osd_g_force_pos = 2094
set osd_current_pos = 2080
set osd_mah_drawn_pos = 2103
set osd_craft_name_pos = 2433
set osd_gps_lat_pos = 49320
set osd_battery_usage_pos = 34904
set osd_flip_arrow_pos = 2286
set osd_log_status_pos = 2169
set osd_camera_frame_pos = 49152
set debug_mode = GYRO_SCALED
set vtx_band = 4
set vtx_channel = 2
set vtx_power = 1
set vtx_freq = 5760
set gyro_1_sensor_align = CW180
set gyro_1_align_pitch = 0
set rpm_filter_harmonics = 1
set rpm_filter_q = 750
set rpm_filter_min_hz = 125
set name = TP3
profile 0
# profile 0
set dterm_lpf1_dyn_min_hz = 82
set dterm_lpf1_dyn_max_hz = 165
set dterm_lpf1_static_hz = 165
set dterm_lpf2_static_hz = 165
set pidsum_limit = 1000
set pidsum_limit_yaw = 1000
set p_pitch = 51
set i_pitch = 92
set d_pitch = 50
set f_pitch = 137
set p_roll = 49
set i_roll = 88
set d_roll = 44
set f_roll = 132
set p_yaw = 49
set i_yaw = 88
set f_yaw = 132
set d_min_roll = 33
set d_min_pitch = 37
set auto_profile_cell_count = 4
set dyn_idle_min_rpm = 34
set simplified_master_multiplier = 110
set simplified_dterm_filter = OFF
set simplified_dterm_filter_multiplier = 110
rateprofile 0
# rateprofile 0
set rates_type = KISS
set roll_rc_rate = 198
set pitch_rc_rate = 198
set yaw_rc_rate = 165
set roll_expo = 21
set pitch_expo = 21
set yaw_expo = 21
set roll_srate = 64
set pitch_srate = 64
set yaw_srate = 64
set tpa_rate = 70
set throttle_limit_percent = 85
# end the command batch
batch end
#Add any other context about the problem that you think might be relevant here
Is there any added hidden switch that toggles pidsum_limit? I used to set pidsum_limit in cli and it worked.
Also a blackbox log after I have set the pidsum:
btfl_004.txt

I see the pidsum has been set for profile 0 in firmware:
set pidsum_limit = 1000
set pidsum_limit_yaw = 1000
I see the pidsum has been set for profile 0 in firmware:
set pidsum_limit = 1000 set pidsum_limit_yaw = 1000
@haslinghuis yes, but in the logs the pidsum_limit seems to be 500
@haslinghuis I set the pidsum_limit to 1000, confirm it to be 1000 in the cli. After that I take a test flight, but the log shows that pidsum_limit is at 500 during the test flight.

Can you attach the log file? I think the pidsum is taken from the header. We can see what values contain in the header.
Also a blackbox log after I have set the pidsum: btfl_004.txt
@McGiverGim here
Can you attach the log file? I think the pidsum is taken from the header. We can see what values contain in the header.
@McGiverGim also, take a look at this screenshot, in the red box the pidsum is limited to 50%
Something is wrong with your configuration (or with the firmware code, not with the blackbox). As you can suspect seeing the screen capture of the table of the blackbox, this is at the header of your file:
H pidsum_limit:500
H pidsum_limit_yaw:400
I've some ideas:
- Are you sure that you are selecting the profile 0?
- I see you use too the
auto_profile_cell_count, maybe it is changing your profile by other? - I don't remember if there is a OSD element that show the profile selected. Add it to your OSD and verify what appears here.
Not only the PID Sum limit is wrong, the PID values are wrong too, and I suspect any parameter you have changed for the profile 0, because it is using another profile.
Something is wrong with your configuration (or with the firmware code, not with the blackbox). As you can suspect seeing the screen capture of the table of the blackbox, this is at the header of your file:
H pidsum_limit:500 H pidsum_limit_yaw:400I've some ideas:
- Are you sure that you are selecting the profile 0?
- I see you use too the
auto_profile_cell_count, maybe it is changing your profile by other?- I don't remember if there is a OSD element that show the profile selected. Add it to your OSD and verify what appears here.
Not only the PID Sum limit is wrong, the PID values are wrong too, and I suspect any parameter you have changed for the profile 0, because it is using another profile.
@McGiverGim Wow that explains the problem! I set the cell count of this profile to 4, and I run it on a 3s battery.