Tabelas de conteúdo
O CONJUNTO DE ROBÓTICA EDUCIONAL ED06 apresenta aos estudantes a oportunidade de utilizar os conhecimentos teóricos, aplicando-os de forma prática por meio da construção de protótipos funcionais que, contextualizados, aperfeiçoam a qualidade do ensino e aprendizagem nas escolas.
O kit é constituído por mais de 750 peças plásticas que possibilitam a realização de atividades em grupos de 2 a 4 alunos através da tipologia e quantidade adequada de cada tipo de peças e que exploram diferentes áreas do conhecimento – ciência, tecnologia, engenharia, artes e matemática – por meio da construção de montagens sem motorização, com motorização e/ou automatizadas (máquinas, equipamentos, etc.), utilizando, para tanto peças plásticas facilmente encaixáveis ( ou não ¯\_(ツ)_/¯ ), não dependendo do uso de ferramentas.
Todos os itens apresentam plena compatibilidade mecânica e eletrônica com as peças de montar e a interface eletrônica.
-
Rodas, Pneus, e engrenagem.

-
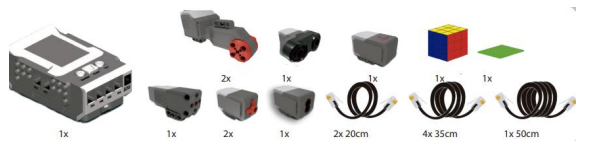
Sensores, Atuadores, Cabo e outros.
-
Eixos

-
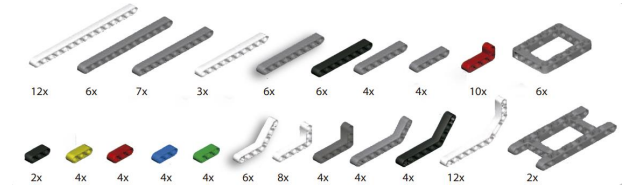
Vigas
-
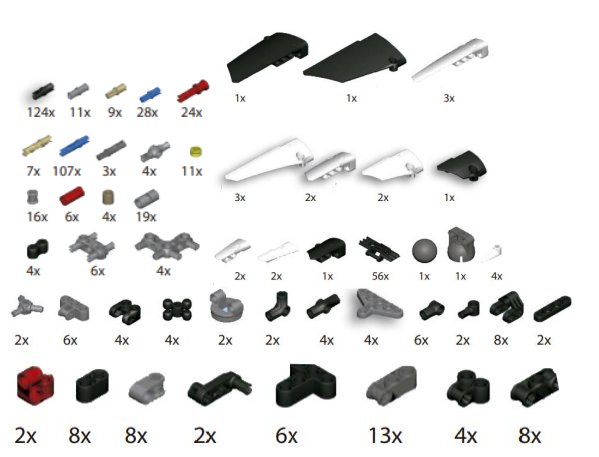
Conectores e peças complementares diversas
-
Componentes eletrônicos plugáveis
- 01 Motor de corrente contínua de 5V, tamanho médio.
- 02 Sensores de toque.
- 02 Motor de corrente continua de 5v,tamanho grande
- 01 Sensor de Distancia Ultrassônico
- 01 Sensor giroscópio
- 01 Sensor de cor
-
-
Especificações do software
- Programação em bloco e todos os ícones em português
- Compatível com os sistemas operacionais Linux e Windows
- Criação de jogos com personagens e fundo
-
Unidade de controle arquitetura ARM
-
Configuração da bateria
- Bateria: Fornecimento externo de energia, suporta 6 pilhas/ bateria de lítio 2200mA
- Modo de carregamento: carregamento da bateria de lítio
- Capacidade da bateria: 220mAh
- Tensão de carregamento: 8,4V
- Tempo de carregamento: 2.2hrs
- Tempo de uso: aproximadamente 3 horas.
-
Característica da Tela
- Memória interna/ memória flash: 512KB/8MB (expansível)
- TFT: 2.4 polegadas, tela colorida
- Toque: touchScreen
- Exibição: Português, exibindo números, textos e imagens etc.
- Resolução: 320×240 pixels
-
Configuração do sistema:
-
Controlador programável: Corext-M3
-
Sistema: sistema real-time
-
Frequência básica: 7.2Mhz
-
RAM/USB: 64Mb/2.0
-
WIFI/MP3: tipo esportivo
-
Compatibilidade: Android/IOS/Windows
-
Programa de desenvolvimento: SCRATCH 3.0
-
Tipo de comunicação de controle: WIFI
-
Botão: 1 botão de força e 2 teclas de função
-
Entrada RJ12 para sensores: 8
-
Saídas RJ12 para motores

-
-
-
A controladora é programável por software do tipo Scratch. A interface utiliza como fonte de alimentação conexão USB através de computador ou baterias recarregáveis instaladas internamente em formato de case além de possibilidade de utilizar fonte externa DC. O cabo USB e baterias (e seus respectivos carregadores) e fonte externa DC estão inclusos no kit.






| OS | LINK |
|---|---|
| Windows | KaziCode_Setup_1.0.32.rar |
| Linux | scratch-en-linux.zip |
Caso o download não seja feito e o navegador esteja barrando, copie o endereço do link, cole a url no navegador e ao iniciar o download clique em 'manter'
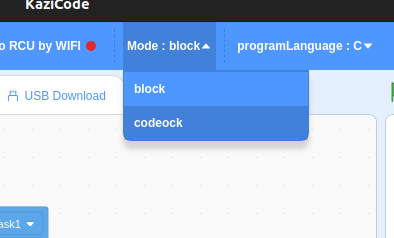
No kazi code podemos optar por programar no modelo do scratch (Códigos em bloco) ou escolher alguma linguagem como C ou Python. Por padrão o Kazi irá abrir em modo de código em bloco
-
Para realizar a troca do modo de programação selecione o modo de coding desejado no menu superior:
-
O modo codeock será o modo de programação utilizado para as linguagens selecionadas
-
Para selecionar a linguagem desejada basta escolher no menu superior ao lado do modo de programação:


