
- Camera Calibration
- Camera -- LiDAR cross calibration (W.I.P)
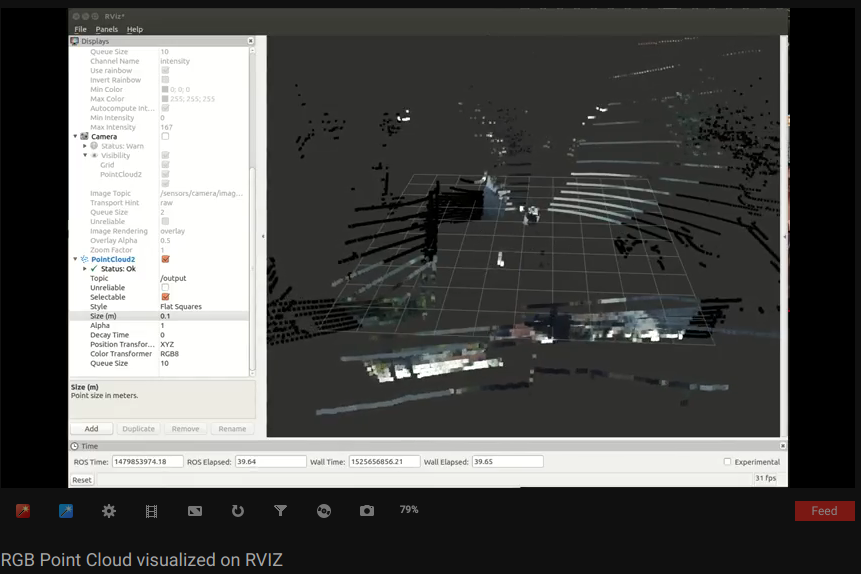
- Visualization of RGB data in point cloud (W.I.P)
This project was tested on Ubuntu 16.04 and ROS Kinetic Clone the repo, download the rosbag from here and follow the instructions below to run it.
You have to edit the location of the rosbag; pointing to wherever it is on your system, in the
lidar_composite.launchfile inside thelidar-calibpackage
cd lidar-camera-calib/
catkin_make
source devel/setup.bash
roslaunch lidar_calib lidar_composite.launch
You should see an image window pop-up showing the video of the LiDAR points projected on the image frame.
You can also visualize the LiDAR and the composite lidar image data on rviz.
cd lidar-camera-calib/
catkin_make
source devel/setup.bash
roslaunch lidar_calib rgb_lidar.launch
This can be visualized on rviz by running
rosrun rviz rviz
Make sure to add the PointCloud2 topic
rgb_outputand set the size of the Flat Squares to atleast0.08to properly get the output.
The transformation is still not accurate and thus the output is average, which can be improved.
A writeup of this project is located here
I referred the following articles:
Processing Camera Data
OpenCV Camera Calibration and 3D Reconstruction
Programming Computer Vision with Python