Error in feature extraction from ouster lidar
rupikaraj opened this issue · comments

I am using this code with a usb cam and ouster os1 lidar on ROS noetic. I used a prerecorded rosbag for the data.
I have done some changes in the cam_lidar_calibration.rviz.
Class: rviz/Image Enabled: true Image Topic: /cv_camera/image_raw
and Global Options: Background Color: 48; 48; 48 Default Light: true Fixed Frame: os_sensor Frame Rate: 30 so that this code will work for my os1 lidar and camera. While running the launch file for rviz, the image is loading without any issues, but the pointclouds from os_sensor is not loading. Hence the rqt gui is also not working. I have added the screenshots below.
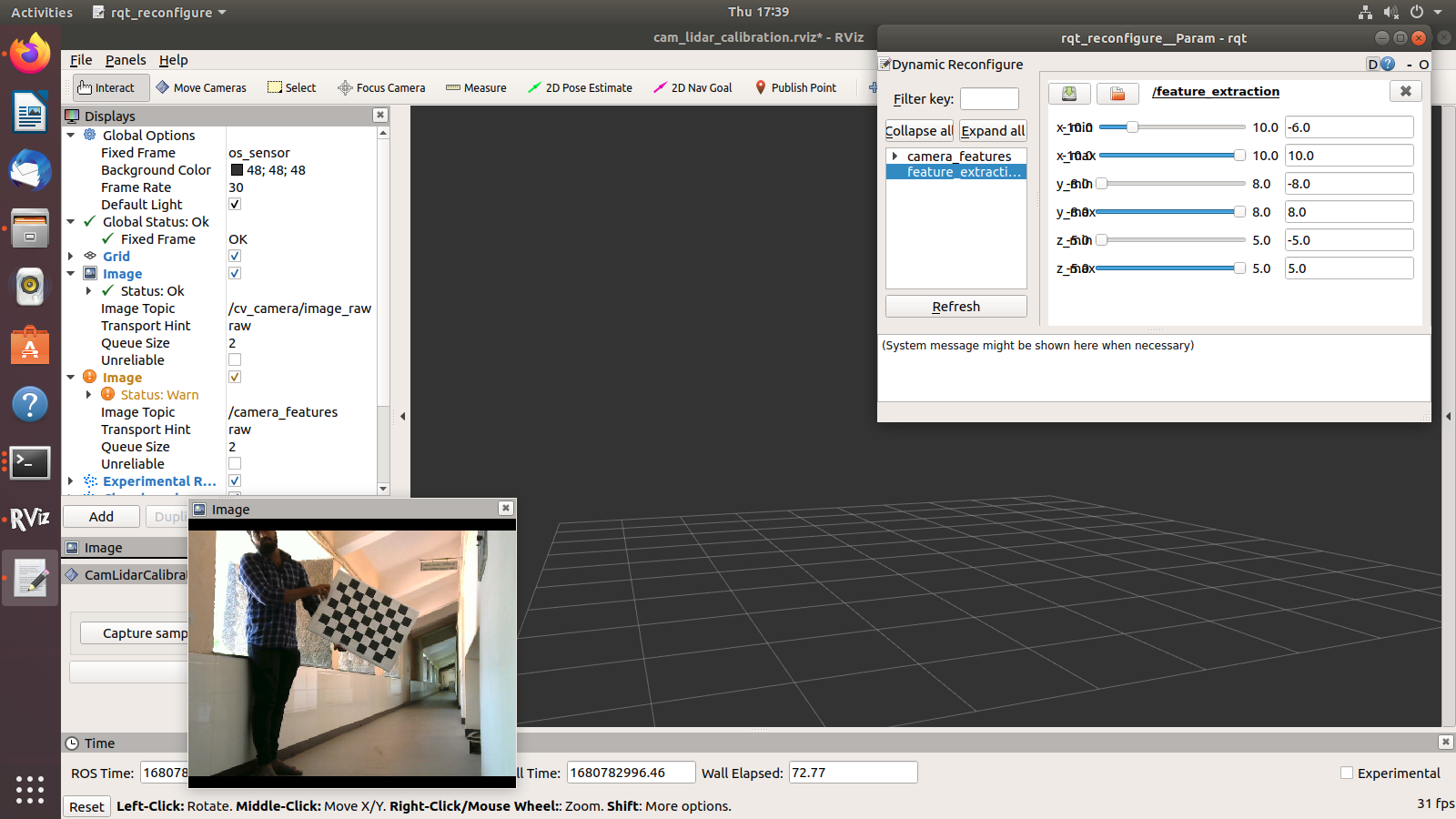

Can someone please tell me what all changes should i make for my code to work properly?
Thanks in advance

I am using this code with a usb cam and ouster os1 lidar on ROS noetic. I used a prerecorded rosbag for the data. I have done some changes in the cam_lidar_calibration.rviz.
Class: rviz/Image Enabled: true Image Topic: /cv_camera/image_rawand
Global Options: Background Color: 48; 48; 48 Default Light: true Fixed Frame: os_sensor Frame Rate: 30so that this code will work for my os1 lidar and camera. While running the launch file for rviz, the image is loading without any issues, but the pointclouds from os_sensor is not loading. Hence the rqt gui is also not working. I have added the screenshots below.
Can someone please tell me what all changes should i make for my code to work properly? Thanks in advance
hi, friend, you can change the src/cam_lidar_calibration/cfg/params.yaml topic ,for example, # camera_topic: "/gmsl/A0/image_color" to lidar_topic: "/rslidar_points"(this is my lidar topic)

[feature_extraction-1] process has died [pid 93910, exit code -6, cmd /home/duduzai/SPbot/itsc_calib_ws/devel/lib/cam_lidar_calibration/feature_extraction_node __name:=feature_extraction __log:=/home/duduzai/.ros/log/51abcb48-da75-11ed-8ebb-97b7bce6879a/feature_extraction-1.log].
log file: /home/duduzai/.ros/log/51abcb48-da75-11ed-8ebb-97b7bce6879a/feature_extraction-1*.log
somebody can tell me why? thanks

Can someone answer this issue? I still can't find a way to use the ouster data with this pkg. When I try to use the extractor, it doesn't filter the point cloud.
Thanks in advance.

It says right there: "width and height of the pattern should have bigger than 2 in function findChessboardCorners. Your parameters for the board and/or camera info are wrong.
Furthermore, no pointcloud is shown in Rviz. When all your parameters are correct, the filtered cloud will be shown. Your pointcloud topic seems to be wrong, because your reconf parameters are fine.

@rupikaraj are you collecting data and then playing back along with this tool or are you trying to do the calibration live?
To me it looks like you have not setup the config parameters in the files within the cfg folder properly. If you are still having issues please feel free to reopen this. I am closing it for now.

I am using this code with a usb cam and ouster os1 lidar on ROS noetic. I used a prerecorded rosbag for the data. I have done some changes in the cam_lidar_calibration.rviz.
Class: rviz/Image Enabled: true Image Topic: /cv_camera/image_rawand
Global Options: Background Color: 48; 48; 48 Default Light: true Fixed Frame: os_sensor Frame Rate: 30so that this code will work for my os1 lidar and camera. While running the launch file for rviz, the image is loading without any issues, but the pointclouds from os_sensor is not loading. Hence the rqt gui is also not working. I have added the screenshots below.
Can someone please tell me what all changes should i make for my code to work properly? Thanks in advance
Hi @rupikaraj , I meet the same problem now. Have you find out how to solve this problem?