RoboNet-哨岗相机机器人视觉定位算法
RoboNet/
├── yolo_test_with_camera.py #哨岗相机定位测试
├── yolo_tiny.py #YOLO v3 tiny类函数
├── Car_info.py #战车尺寸参数定义
├── coordinate_transformer.py #相机模型定义,用于坐标变换
├── Tracker.py #战车位姿卡尔曼跟踪器
├── README.md #说明文档
├── test_video.mp4 #测试视频
├── font #展示检测结果时用的字体文件
│ └── FiraMono-Medium.otf #字体库
├── model_data #神经网络模型权重及配置文件
│ ├── AngleEstimator.h5 #朝向角估计模型文件
│ ├── RedBlueDetect.h5 #红蓝车YOLO模型文件
│ ├── robomaster_classes.txt #红蓝车YOLO模型索引对应类别
│ ├── ROIFeature.h5 #车轮、装甲板、尾灯检测模型文件
│ ├── roi_classes.txt #车轮、装甲板、尾灯检测模型索引对应类别
│ ├── yolo_anchors_robot.txt #红蓝车YOLO模型anchors
│ └── yolo_anchors_roi.txt #车轮、装甲板、尾灯检测模型anchors
├── pics #README中插入图片文件
│ ├── loss_for_angle_estimation.png #训练朝向角估计模型时损失函数图
│ ├── loss_for_rb_car_detection.png #训练红蓝车检测模型时损失函数图
│ ├── keypoints.jpg #关键点位置和顺序图
│ ├── select_4_keypoints.jpg #选取关键点示例
│ ├── software-framework.png #软件框架图
│ ├── test_result.gif #测试效果动态图
│ └──Yolo_v3_Structure.png #YOLO v3模型结构图
├── yolo3 #YOLO v3模型
│ ├── model.py #YOLO v3模型
│ └── utils.py #辅助函数
依赖工具
该部分基于Python语言,利用深度学习算法、视角变换和跟踪算法实现战车的定位和跟踪;
可通过rospy实现与战车间的通讯;
程序依赖工具如下:
- python3.7
- TensorFlow==1.15
- numpy
- opencv
- sklearn
- matplotlib
- filterpy
内容简述
本程序可利用全局视角相机采集的图像信息,基于神经网络图像识别技术对机器人特征进行识别,并可求解对应机器人的全局位置与姿态。该位姿信息可以通过通讯传送给己方机器人,从而提高己方定位精度,并为智能决策提供全局态势判断。本程序主要包含以下五个功能模块:
-
红色车、蓝色车物体检测模块(YOLO v3)
-
车轮、装甲板、尾灯检测模块(YOLO v3)
-
估算战车在ROI坐标中的朝向角模块(卷积+全连接预测角度的sin与cos值)
-
像素图与地图之间坐标变换模块
-
基于卡尔曼滤波与匈牙利算法的车辆位置与角度跟踪模块
软件架构如下图所示


各模块简要介绍如下(本算法理论基础及感知部分算法介绍可见项目wiki):
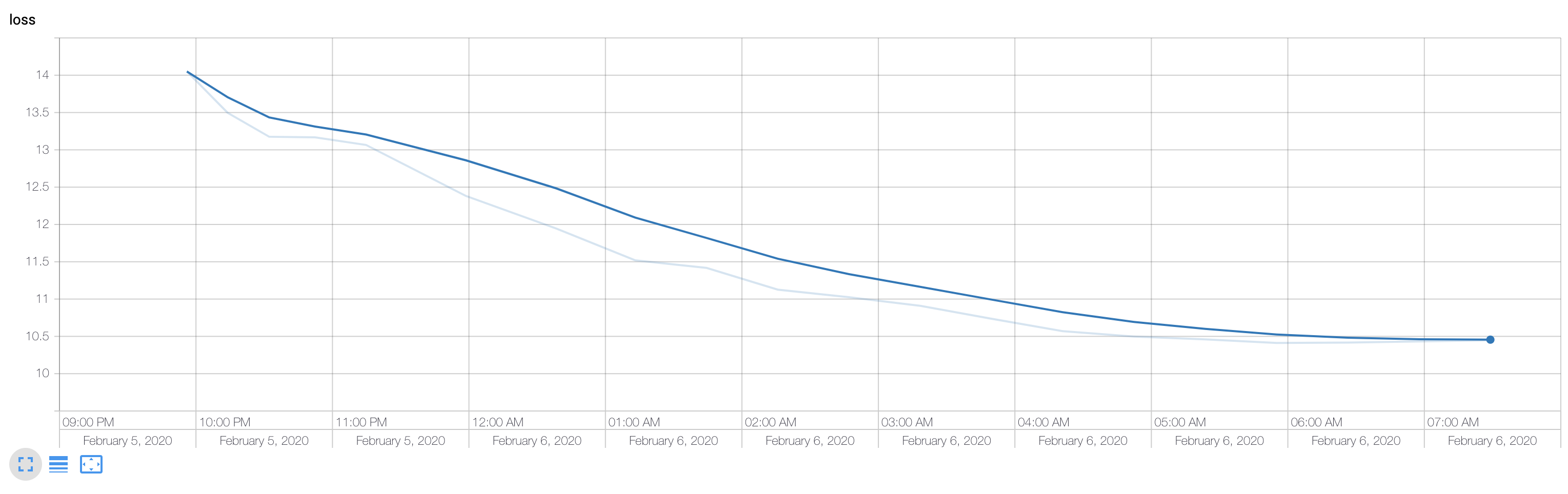
红色车、蓝色车物体检测模块(YOLO v3)
-
采用YOLO v3的Tiny版本,输入为416x416的RGB图,输出BoundingBox的位置、尺寸、置信度及类别概率
-
loss图:
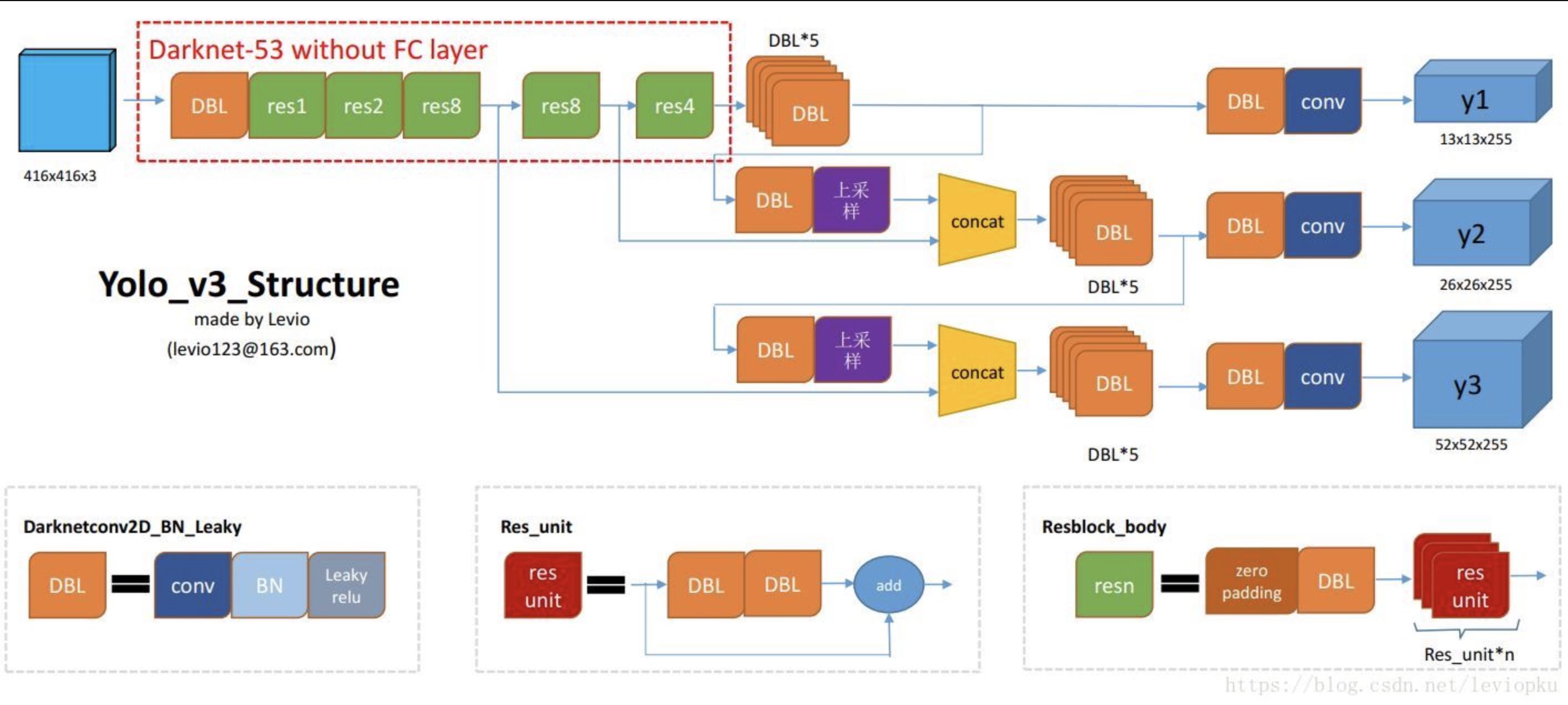
-
网络结构图(把Darknet53换成19, 两个多尺度预测):


车轮、装甲板、尾灯检测模块
- 与红蓝车检测模型基本相同,只是输入尺寸改为288x288,输出类别有:车轮、红1装甲板、红2装甲板、蓝1装甲板、蓝2装甲板、红尾灯、蓝尾灯
- 将车检测与车的特征检测分开的原因:
- 在输出尺寸416x416的情况下,直接检测所有特征可能分辨率不够
- 类别变多会使网络运行速度变慢(影响不大)
- 使得车的特征定位更精确,有利于之后估计车在世界坐标下的位置
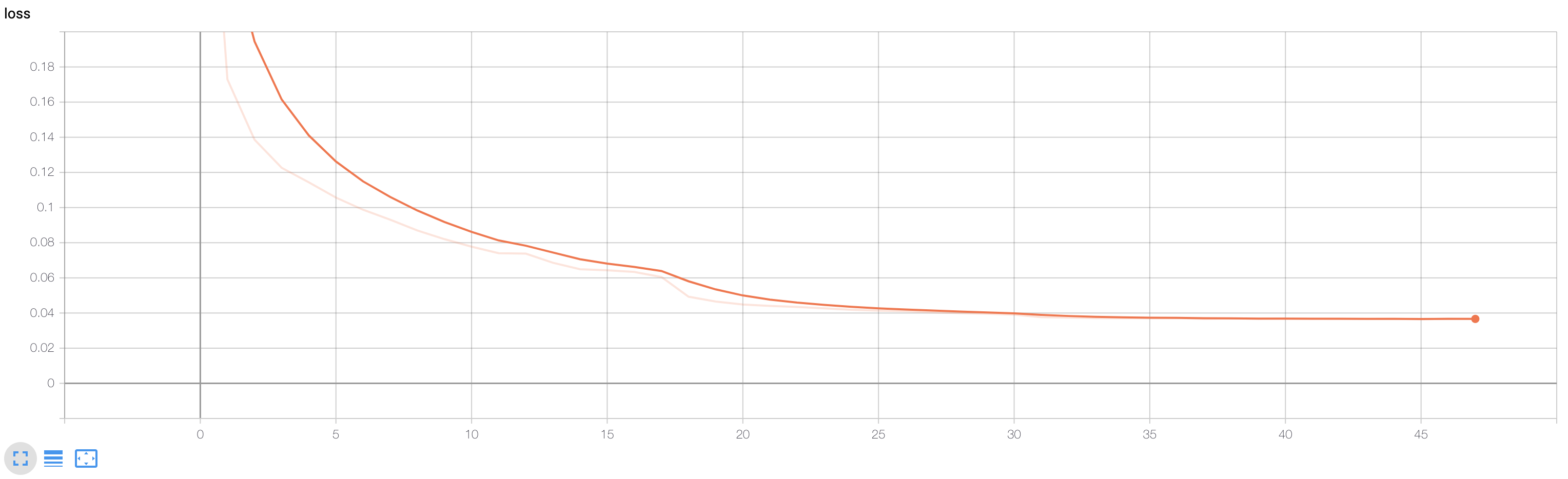
根据ROI估算战车在ROI坐标中的朝向角
-
尝试过基于颜色、边界特征估算车的朝向角,人工寻找特征较为麻烦,且效果不够理想,所以最终采用神经网络预测
-
输入96x96x1的灰度图
-
输出该图对应朝向角的cos,sin值(没有直接预测角度,因为0度和360度实际朝向一样,这会给损失的计算带来麻烦)
- 朝向正右方时角度为0(cos=1,sin=0)
- 朝向正下时角度为90(cos=0,sin=1)
-
之后可以根据尺寸缩放调整cos,sin值,获得原始尺寸下的朝向角
-
loss

像素图与地图之间坐标变换
- 首先通过张正有标定法,标定了所用哨岗相机,得到了哨岗相机内参
- 之后在实际应用中,选择地图与像素图大于等于4个点对,计算出地图到像素图的单应性矩阵,已知内参矩阵通过SolvePnP得到相机的外参
- 可实现已知某特征像素点坐标及该特征在世界坐标的高度,反解出该特征在世界坐标系下的坐标
基于卡尔曼滤波与匈牙利算法的车辆位置与角度跟踪
- 在得到检测结果后,可得到每个检测到的bounding box属于ID(红1、红2、蓝1、蓝2)的概率矩阵,再计算坐标变换后的车位置与卡尔曼滤波预测位置的IOU矩阵
- 将上述两个矩阵相加,通过匈牙利算法选出每个检测结果对应的ID,进而更新卡尔曼滤波器
软件效果展示
测试步骤
-
在RoboNet目录下,运行
python yolo_test_with_camera.py -
在弹出的scene_image窗口中依次双击选择4个关键点(按退格键清除上一次选中点,4个点选中好后按回车确认)
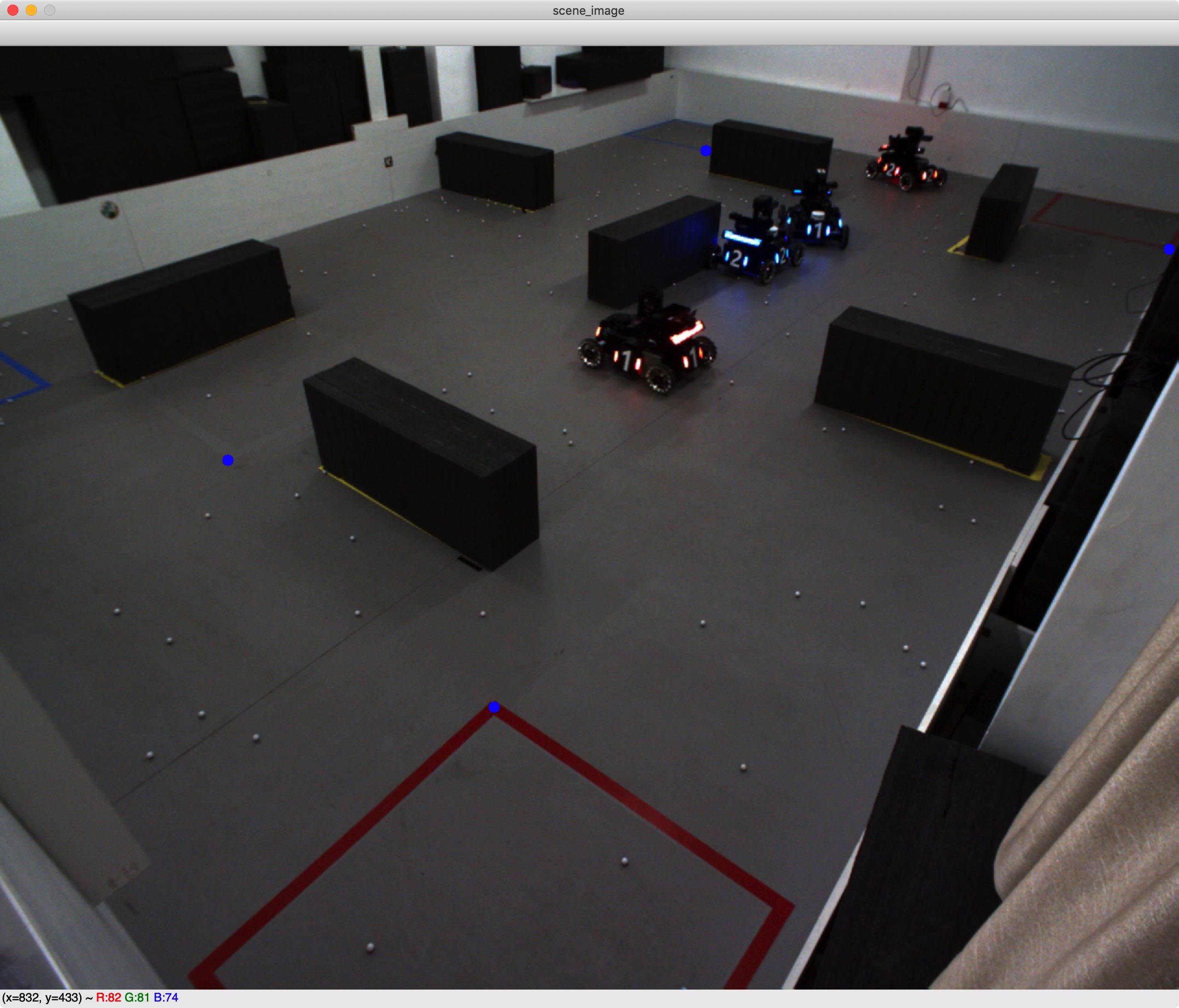
关键点的选择顺序为:
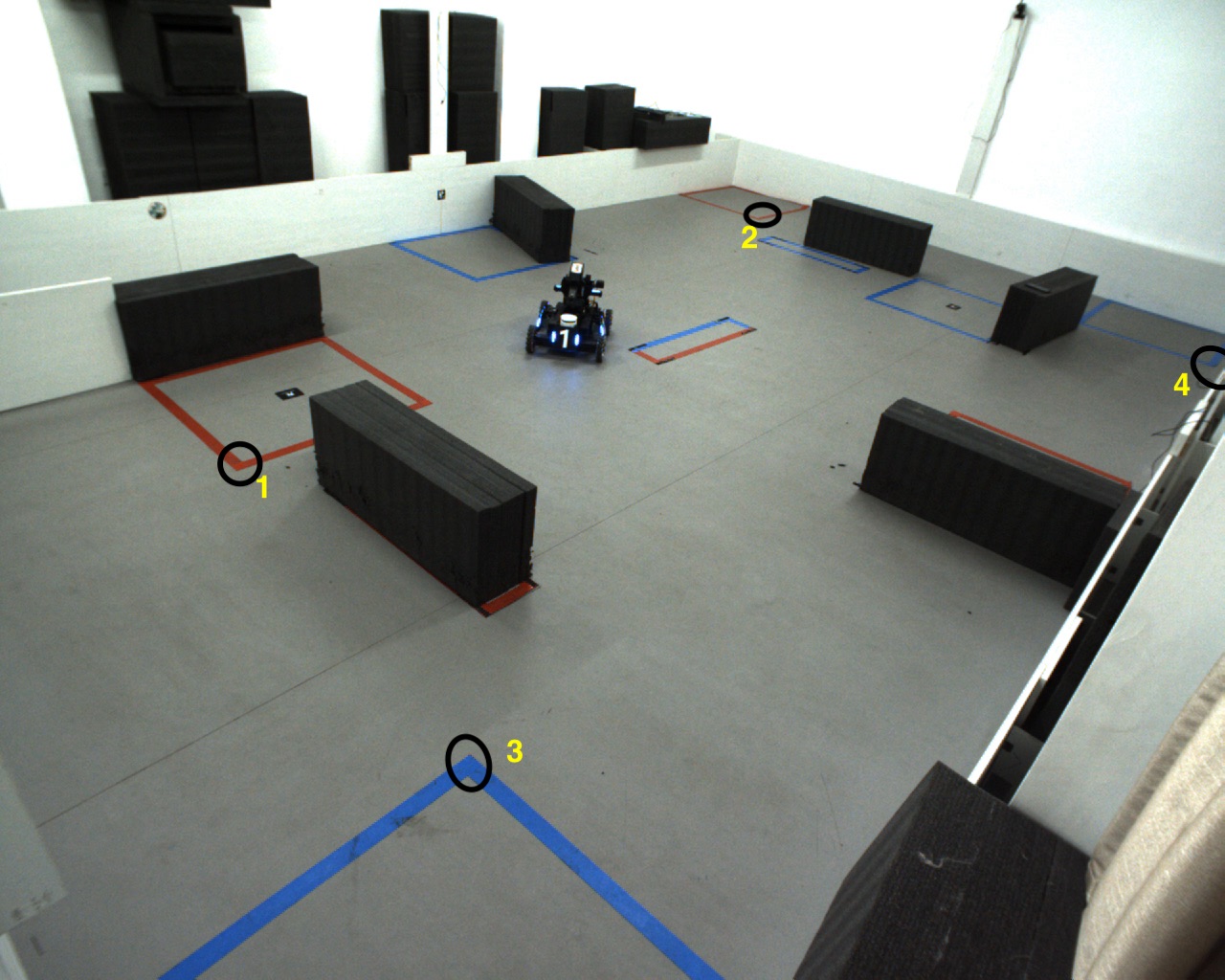


测试结果

开源协议
MIT License